Ce glossaire des termes de la robotique ne se veut pas exhaustif mais rassemble quelques termes spécifiques que vous pourrez rencontrer au cours de vos lectures sur les robots mobiles et qu’il nous parait intéressant de préciser.
Liste des termes
Asservissement
Basic Stamp
BEAM
Capteurs
Conduite Différentielle
CMUCAM
Echolocalisation
Effecteur
Hexapode
Odométrie
Pathfinding ou la recherche de chemin
Perceptual aliasing
Reseaux neuronaux
Robot
Robotique Evolutive
Robotique Probabiliste
Subsumption
Télémetrie
Asservissement
En Automatique, l’asservissement désigne un algorithme dont l’objet principal est de stabiliser et d’améliorer la réaction d’un système par rapport à sa consigne de départ. L’idée est de comparer l’état du système avec sa consigne de départ et de corriger si nécessaire. Par exemple, si l’on programme un robot pour qu’il suive une ligne blanche tracée au sol, on va programmer un algorithme qui va vérifier l’écart par rapport à la ligne suivie et qui va éventuellement prendre des mesures correctives si l’écart est trop important (c’est pour cela que les mouvements d’un robot comme Lego Mindstorms NXT programmé pour suivre une ligne sont saccadés).
Plutôt que d’asservissement, on parle également de système commandé par rétroaction négative ou de système en boucle fermée.
Pour en savoir plus sur l’asservissement :
Basic Stamp
Le Basic Stamp est le microcontroleur inclus dans les robots Boe-Bot et SumoBot de la société Parallax. Ce microcontroleur se programme en BASIC, un environnement de programmation (IDE) est d’ailleurs fourni avec les robots Boe-Bot et SumoBot.
Les robots Boe-Bot et SumoBot contiennent un livret relié particulièrement bien documenté indiquant comment programmer ces robots via le Basic Stamp, mettant la programmation de ce microcontroleur à la portée de tous.
BEAM
BEAM est un acronyme pour Biologique Electronique Esthétique et Mécanique. Les robots BEAM sont des robots dénués d’intelligence dans le sens où ils n’embarquent pas de microcontrôleurs et ne sont donc pas programmables. Ils sont constitués uniquement d’éléments mécaniques et d’électronique simple. Ces robots se rapprochent plus des jouets. Génération Robots n’a pas vocation à proposer des robots BEAM.
Capteur
Les capteurs sont les composants du robot qui lui permettent de connaitre son environnement ainsi que son état interne. On parle aussi de senseur. Ces capteurs fournissent une information soit à une brique intelligente centrale (il peut aussi y en avoir plusieurs) soit agir directement agir sur les effecteurs dans le cadre d’un arc réflexe.
Quelques types de capteurs que l’on retrouve habituellement sur les robots mobiles (liste non exhaustive bien entendu) :
| Type de capteur | Type de mesure |
| Capteurs ultrasons | Mesure de distance (télémétrie) |
| Capteurs infrarouge | Mesure de distance (télémétrie) |
| Capteurs RFID | Mesure de position par rapport à un récepteur RFID (un transpondeur) |
| Capteurs Laser | Mesure de distance (télémétrie) |
| Capteur de lumière | Mesure de l’intensité de la lumière |
| Capteurs de couleur | Identification des couleurs |
| Capteur de son | Mesure de l’intensité d’un son |
| Capteurs de mesure d’angle, de rotation | Mesure d’un angle, d’une rotation d’un axe |
| Accéléromètres | Mesure de variation de la vitesse (accélération) |
| Capteurs d’humidité | Mesure de l’humidité externe |
| Capteur de température | Mesure de la température (interne ou externe) |
| Capteurs magnétiques | Mesure d’un champ magnétique en intensité et ou en direction (souvent utilisé pour se repérer par rapport au champ magnétique terrestre). |
| Capteur GPS | Mesure d’un positionnement |
| Caméra (Webcam,CMUCAM) | Vision |
CMUCAM
La CMUCAM est une petite caméra embarquée, spécialement conçue pour la robotique mobile. Elle comprend une caméra et un microcontrôleur qui propose des services simples d’analyse d’image et de suivi de Blob. La CMUCAM est donc un système de vision embarqué relativement simple.
Les premières spécifications de ce type de caméra ont été réalisées par l’université de Carnegie Mellon, université très connue aux Etats-Unis pour être en pointe dans le domaine de la robotique.
Les caméras CMUCAM proposées sur Génération Robots :
Pour en savoir plus sur la CMUCAM :
Conduite différentielle
(Differential drive en anglais)
Pour les robots à deux roues ou les robots ayant des chaînes, cela consiste à moduler la vitesse et le sens rotation de chacune des roues ou chenille afin de déterminer la direction du mouvement ainsi que la rotation du robot. Par exemple, si les deux roues tournent dans le même sens et à la même vitesse, alors le robot va en ligne droite. En revanche, si l’on augmente la vitesse de la roue droite par exemple, cela va faire tourner le robot vers la gauche. L’angle du virage dépendant de la différence de vitesse entre les deux roues.
Echolocalisation
Le dictionnaire Larousse donne la définition suivante du mot écholocalisation : « Moyen de localisation des obstacles ou des proies, utilisé par divers animaux vivant dans l'obscurité (chauves-souris) ou dans l'eau (cétacés), et consistant à émettre des ultrasons ou des sons aigus et à apprécier le temps de retour de leur écho dans les diverses directions. » Dans les robots mobiles programmables, ce principe est repris par les capteurs ultrasons.
Effecteur
Il s’agit de la partie opérative du robot. Souvent, il s‘agit de moteurs déclenchant des mouvements (mouvements d’un bras robotique, rotation des roues, mouvement des pattes sur un hexapode…). Il peut s’agir aussi de vérins pneumatiques ou hydrauliques.
On parle aussi d’actuateur ou d’actionneur.
Concernant les moteurs que l’on trouve sur les robots mobiles, on parle plutôt de servomoteurs. Un servomoteur est un moteur capable d’atteindre une position déterminée et de la maintenir. Il peut s’agir d’un angle en particulier ou d’une distance à parcourir. Lorsque vous programmez un servomoteur pour votre robot mobile, vous déterminez une durée de rotation et/ou une vitesse et/ou un nombre de tours…
Hexapode
Un robot hexapode a comme son nom l’indique six pattes (par opposition aux robots bipèdes ou à roues ou à chenilles). Parallax propose un crawler kit transformant Boe-Bot en haxapode (Boe-Bot est un robot à roues).
Odométrie
(Dead reckoning en anglais)
Il s’agit d’une technique permettant d’estimer la position d’un robot mobile en mouvement. Littéralement, il s’agit de la science de la mesure et du contrôle du mouvement d’un robot. La mesure se base pour cela sur la mesure individuelle des déplacements des roues du robot. En effet, l’idée est assez simple : si l’on connait le sens de rotation d’une roue, sa vitesse de rotation ainsi que sa durée de rotation et que cette mesure intervient sur toutes les roues du robot, alors on peut estimer l’emplacement du robot par rapport à son point de départ.
L’odométrie fonctionne relativement bien avec des robots munis de roues, elle est bruitée avec les robots utilisant des chenilles à cause du contact des chenilles avec le sol qui est mal défini, et enfin elle est très mauvaise avec les robots utilisant des pattes pour le déplacement ; Le problème avec l’odométrie, c’est que les erreurs s’accumulent au fil du temps. Il est souvent intéressant de coupler ces mesures avec des mesures ponctuelles basées sur d’autres capteurs (RFID, infrarouge…).
Vex Robotics propose des capteurs de rotation pour réaliser des mesures odométriques : encodeurs optiques pour robots Vex Robotics
Pour en savoir plus sur l’odométrie:
Pathfinding ou la recherche de chemin
La recherche de chemin consiste à trouver comment se déplacer dans un environnement entre un point de départ et un point d'arrivée en prenant en compte différentes contraintes
En robotique mobile, planifier un déplacement est complexe. En effet, il s'agit de se déplacer dans un environnement réel. Tout d'abord, le robot ne dispose que d'une estimation de sa position, car ses capteurs ne sont pas parfaits. De la même façon, il doit se déplacer au moyen d'effecteurs qui ne peuvent l'amener là où il décide qu'avec une certaine précision. Afin de prendre en compte ces incertitudes, il est nécessaire de passer à des modèles mathématiques probabilistes. De plus, si on ajoute dans l'environnement des humains ou des animaux, il faut prévoir comment ces entités vont se déplacer afin de les éviter.
La recherche de chemin pour des systèmes physiques réels ou simulés (robot, véhicule, objet solide…) est un domaine de recherche nommé planification de mouvement.
Pour en savoir plus sur le Pathfinding :
Perceptual aliasing
Ce problème désigne l’incapacité du capteur à distinguer de manière unique tous les lieux d’un environnement en raison de ses limitations internes. Par exemple, si le capteur ultrason permet à un robot de se situer le long d’un mur, il ne permet pas de savoir la plupart du temps où il se situe le long de ce mur ? Est-ce à la fin, au milieu ou au début ? Deux mesures effectuées le long de ce mur donnent les mêmes indications (à moins que le robot n’arrive au bout et qu’il détecte l’absence ou la présence d’un coin).
Réseaux neuronaux
Programme informatique s’inspirant du fonctionnement des neurones biologiques. Les neurones sont des cellules biologiques organisées en couche, chaque neurone recevant un signal électrique par ses connexions multiples aux neurones de la couche inférieure et déclenchant ou pas un signal de sortie vers la couche suivante en fonction d’une fonction d’activation. Ce fonctionnement est reproduit dans les réseaux neuronaux artificiels car ils constituent des programmes robustes et flexibles et apprenant les tâches en fonction des données d’entrainement qui sont fournies au réseau. On parle alors d’induction ou d’apprentissage par l’expérience.
Pour en savoir plus : l’article complet de Wikipédia sur les réseaux neuronaux :
Robot
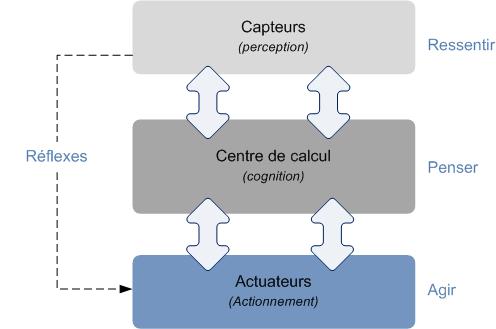
C’est un dispositif mécanique réalisant des tâches en fonction d’un programme qui lui a été assigné. Généralement, les robots ont une architecture que l’on peut schématiser de la sorte :
Le mot Robot vient du Tchèque et signifie esclave. Il a été utilisé pour la première fois par l’écrivain Karel Capek dans sa pièce RUR (Rossum’s Universal Robots).
Le mot robot est un terme générique différent d’androïde qui désigne un robot mécanique à l’apparence humaine, ou du terme Cyborg qui désigne une créature mi-humaine mi-artificielle.
Le terme robotique a lui été introduit par l’écrivain Isaac Asimov, le fameux auteur des trois lois de la robotique.
Les robots proposés par Génération Robots sont des robots mobiles (autonomes ou non) qui sont programmables. Ces petits robots sont de bons modèles d’apprentissage de la robotique.
Robotique évolutive
(Evolutionary Robotics en anglais)
Nouvelle vision de la robotique dans laquelle les robots sont perçus comme étant des organismes autonomes qui apprennent sans l’intervention ou la programmation explicite des tâches de l’homme. Cette vision s’inspire largement des principes Darwinien de la sélection des facteurs et comportements les plus adaptés.
L’idée est de tirer partie des technologies comme les algorithmes génétiques et les réseaux de neurones pour que les robots « apprennent » tout seuls quelle est la meilleure stratégie pour résoudre un problème, par apprentissage d’une série de succès et erreurs.
Les robots résultants de cette théorie partagent avec les organismes vivants certaines caractéristiques comme la simplicité, la robustesse, la modularité et la flexibilité (étant donné qu’ils s’adaptent à l’environnement, ils sont flexibles quant aux modifications de ce même environnement).
Pour en savoir plus :
Robotique probabiliste
Cette technique consiste à intégrer les probabilités dans les programmes développés pour gérer les robots afin de gérer le caractère incertain de l’environnement, ceci afin d’optimiser la perception mais aussi l’action. Les avantages de cette technique est que le robot ainsi programmé peut s’affranchir des modèles imprécis et des capteurs imparfaits.
Subsumption

Il s’agit d’une architecture robotique (matérielle et logicielle) spécifique proposée par Rodney Brooks (professeur au MIT et ancien directeur de la société Irobot), en 1986 dans son article « Mobile Robots: Inspiration to Implementation ». Cette architecture associée au mouvement de la robotique basée sur le comportement (behavior based robotics) a eu une influence certaine dans le monde de la robotique mobile.
L’idée de base de cette architecture de Subsumption consiste à organiser les comportements d’un robot en couches de la moins abstraite à la plus abstraite. Les couches du bas (les moins abstraites) ayant une priorité plus forte. On dit que les couches du haut subsument les couches situées en dessous. Chaque couche est reliée aux capteurs ainsi qu’aux effecteurs. Ainsi, un événement interprété par les capteurs déclenchera des réponses de chaque couche qui pourront soit être contradictoire, soit agir dans le même sens.
Les couches du bas, celles ayant une priorité plus forte agissent comme les réflexes dans les êtres vivants, tandis que les couches hautes agissent comme des tâches planificatrices et d’un niveau d’abstraction plus haut.
L’idée principale de Rodney Brooks est qu’il est inutile de créer un cerveau permettant de représenter l’environnement extérieur et que ce type d’architecture basé sur le comportement peut tout à fait mener à des comportements d’apparence intelligente. Pour Rodney Brooks, le monde est son meilleur modèle.
Bien qu’ayant influencé les roboticiens, cette théorie a cependant certains désavantages comme le fait qu’il est difficile voire impossible de multiplier les couches au risque de se heurter à des interférences forte ou bien que le robot ainsi réalisé est peu flexible (il n’y a pas de mise en œuvre d’adaptation ou d’apprentissage dans les couches mises en œuvre et dans leur organisation).
Télémétrie
Procédé technique permettant de calculer ou de mesurer la distance d'un objet lointain par utilisation d'éléments optiques, acoustiques ou radioélectriques. Les instruments utilisés sont des télémètres. Les capteurs ultrasons proposés sur Génération Robots permettent par exemple de réaliser une télémétrie.
Dans le monde de la robotique, on retrouve souvent la télémétrie infrarouge, ultrason ou laser.
Génération Robots (http://www.generationRobots.com)
Tout usage et reproduction soumis à autorisation explicite préalable.