Merksatz: Booster T1 stellt eine einsatzbereite Hard- und Softwarebasis bereit, sodass mehr Zeit für Algorithmen und Experimente bleibt.
Humanoide Robotik ist anspruchsvoll: Die Stabilisierung der Mechanik, des Gleichgewichts, der Wahrnehmung und des Software-Stacks dauert Monate. Diese Arbeiten sind notwendig, lenken Teams aber häufig von den eigentlichen Forschungsfragen ab. Der Booster T1 bietet eine pragmatische Alternative: eine robuste humanoide Plattform mit integrierter Architektur und ein Software-Ökosystem, das für den Transfer von Simulation zu realem System (sim-to-real) ausgelegt ist. Forschende und Studierende können sich so auf Regelung, Wahrnehmung und Lernen konzentrieren, statt auf Infrastruktur.
Merksatz: T1 kombiniert Lokomotion und Manipulation mit präziser und störrobuster Kraftregelung.
Booster T1 wurde für Aufgaben der Loco-Manipulation validiert (Fortbewegung bei gleichzeitiger physischer Interaktion). Arbeiten mit FALCON (Framework für Reinforcement Learning, RL) an der Carnegie Mellon University zeigen eine stabile Ausführung in realen Szenarien. Der Roboter öffnet Türen, zieht Lasten, trägt Objekte und passt seine Haltung an unbekannte Kräfte an. Auf T1 getestete Regelungspolicys wurden auch auf andere Humanoide (z. B. Unitree G1) übertragen, was die Generalisierbarkeit der Methoden unterstützt.
Warum ist das für Hochschule oder Labor interessant?
Diese Bedingungen decken typische Fälle in semi-strukturierten Umgebungen ab: Zugang zu Räumen, Bewegung von Werkzeugen und Geräten, Betätigung von Türen, leichte logistische Assistenz. T1 bietet eine wiederholbare und messbare Grundlage zur Erprobung von Strategien für Kraftregelung, Kontaktplanung und physische Mensch–Roboter-Kollaboration.
Merksatz: T1 bewältigt schnelle, koordinierte Aufgaben mit einer reaktiven Wahrnehmung–Aktions-Schleife.
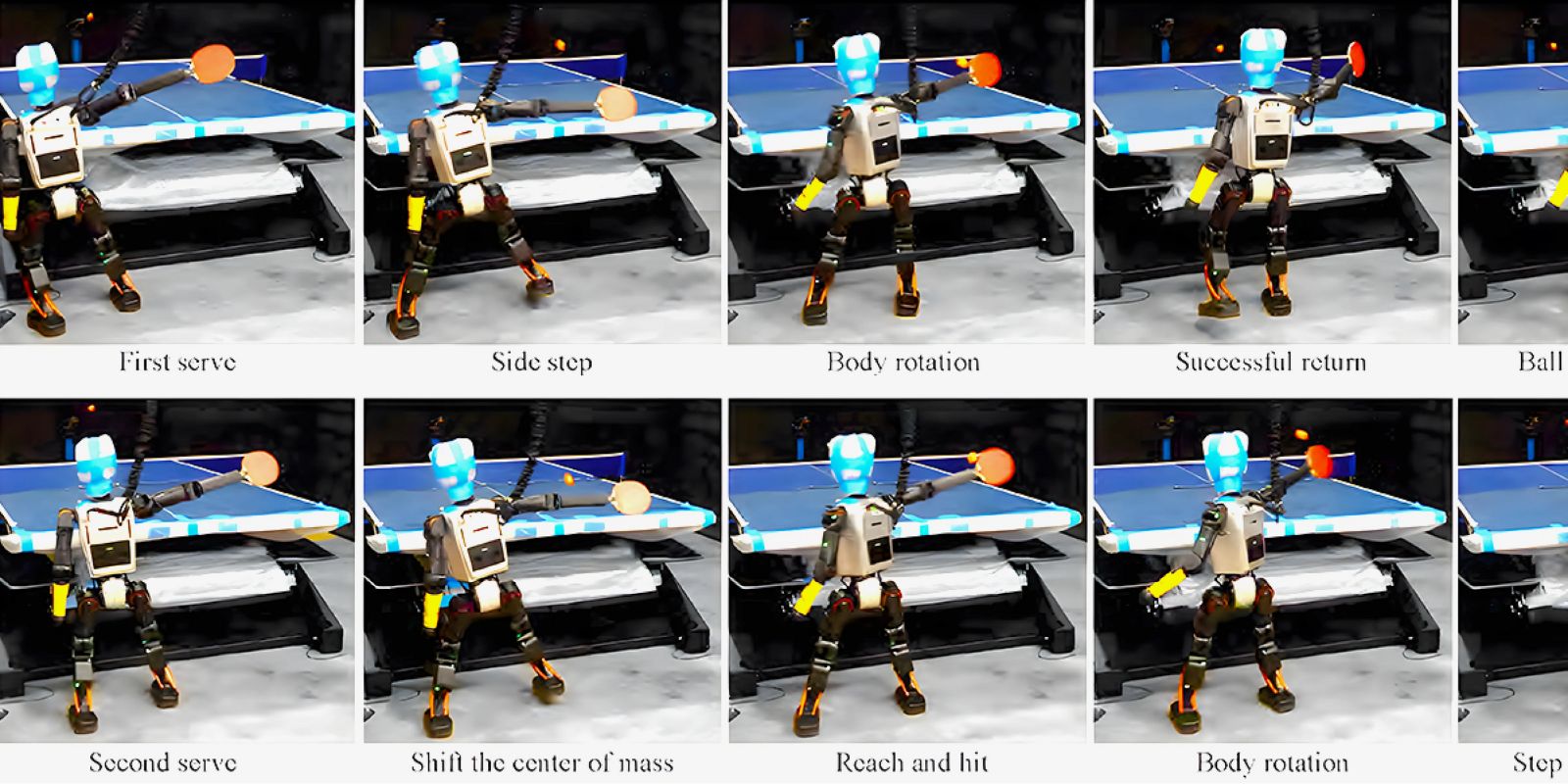
Über Kraftfähigkeiten hinaus erfüllt T1 Anforderungen an Agilität. Eine Referenzstudie zum Tischtennis (arXiv-Publikation) illustriert Reflexe und Ganzkörperkoordination. Der Roboter fängt schnelle Bälle dank Echtzeitwahrnehmung und konsistenter Bewegungsplanung ab: Beinarbeit, seitliche und vor/zurück-Bewegungen, Arm–Rumpf-Synchronisation. In Simulation trainierte Policys werden zero-shot auf dem realen Roboter mit robusten Ergebnissen ausgeführt.
Warum ist das für Hochschule oder Labor interessant?
Diese Kennzahlen bestätigen die Relevanz von T1 für hochfrequente Wahrnehmung–Aktion, RL für agile Aufgaben und Studien zur Biomechanik von Bewegungen. Teams können Reaktivität, Trajektorienvorhersage und Mehrsegment-Koordination untersuchen, während sie auf eine stabile Hardwarebasis zurückgreifen.
Merksatz: spezialisierte Tools, reibungsloser sim-to-real-Transfer und schnelles Training – weniger Reibung, mehr Iterationen.
Der Mehrwert von T1 liegt auch in seinem Software-Ökosystem. Ziel ist es, „Glue Engineering“ zu minimieren und die Schleife Hypothese → Experiment → Analyse zu beschleunigen.
Empfohlener Workflow (Laborpraxis)
1. Entwurf und Training in Simulation (synthetische Daten, Domain Randomization, Sensorausrauschen).
2. Validierung im Hardware-in-the-Loop (HIL) auf T1 mit Instrumentierung von Kraft- und Stabilitätsmetriken.
3. Deployment und Iteration am realen Roboter mit Aufzeichnungen, Replays und gezielten Anpassungen (Policys und Gains).
Auswirkung auf Forschungszyklen.
Diese Pipeline verkürzt die Zeitspanne zwischen Idee und Validierung auf dem Roboter. Promovierende gewinnen an experimenteller Taktung. Betreuende profitieren von reproduzierbaren Protokollen und konsistenten Metriken.
Merksatz: eine stabile Plattform reduziert die experimentelle Varianz und verbessert die Vergleichbarkeit zwischen Teams.
Wissenschaftliche Leistungsfähigkeit beruht auch auf verlässlicher Ingenieursbasis. T1 bietet eine konsistente Architektur (Sensoren, Aktoren, Zeitsynchronisation) und einen gut strukturierten Software-Stack, was Folgendes erleichtert:
Diese Stabilität ist ein wesentlicher Hebel für belastbare Publikationen und Replikationen außerhalb des Ursprungslabors.
Merksatz: die Plattform deckt ein breites Spektrum ab – von Loco-Manipulation bis zu schneller Wahrnehmung.
Merksatz: Booster T1 ist nicht nur ein leistungsfähiger Humanoid; er ist eine Forschungsplattform, mit der sich Ergebnisse schneller und sauberer erzielen lassen.
Durch die Kombination aus bewährter Hardware, Kraftregelung für Loco-Manipulation, Agilität für Wahrnehmung–Aktion-Aufgaben und einem auf sim-to-real ausgerichteten Software-Ökosystem bietet T1 einen robusten Rahmen für akademische Teams. Arbeiten zur Generalisierbarkeit (Transfer von Policys auf andere Humanoide) stärken seine Rolle als Vergleichsbasis und als Werkzeug zur Ergebniserzeugung. Für Labore, die ihre Arbeit zu Regelung, RL, Kontaktplanung und physischer Interaktion beschleunigen wollen, ist Booster T1 eine strukturierende Wahl: Er reduziert Integrationsaufwand, verbessert Reproduzierbarkeit und verkürzt den Weg vom Konzept zum realen Roboter.

Marine Senecat
Content Manager bei Generation Robots