-
 Visit our shop
Visit our shop
-
English
Key takeaway: Booster T1 provides a ready-to-use hardware and software baseline, so you can devote more time to algorithms and experimentation.
Humanoid robotics is demanding: stabilising the mechanics, balance, perception and software stack takes months. This work is necessary, but often pulls teams away from their core research questions. The Booster T1 offers a pragmatic alternative: a robust humanoid platform with an integrated stack and a software ecosystem designed for simulation-to-real transfer (sim-to-real). Researchers and students can thus focus on control, perception and learning rather than infrastructure.
Key takeaway: T1 combines locomotion and manipulation, with precise and disturbance-tolerant force control.
Booster T1 has been validated on loco-manipulation tasks (moving while physically interacting). Work carried out with FALCON (a reinforcement learning framework, RL) at Carnegie Mellon demonstrates stable execution in real scenarios. The robot opens doors, pulls loads, carries objects and adapts its posture to unknown forces. Control policies tested on T1 have also been transferred to other humanoids (e.g. Unitree G1), supporting the generalizability of the methods.
Why is this useful for a university or a lab?
These conditions cover recurring cases in semi-structured environments: accessing rooms, moving tools and equipment, manipulating doors and handles, light logistic assistance. T1 provides a repeatable and measurable basis for testing force control, contact planning and physical human–robot collaboration strategies.
Key takeaway: T1 handles fast, coordinated tasks with a reactive perception–action loop.
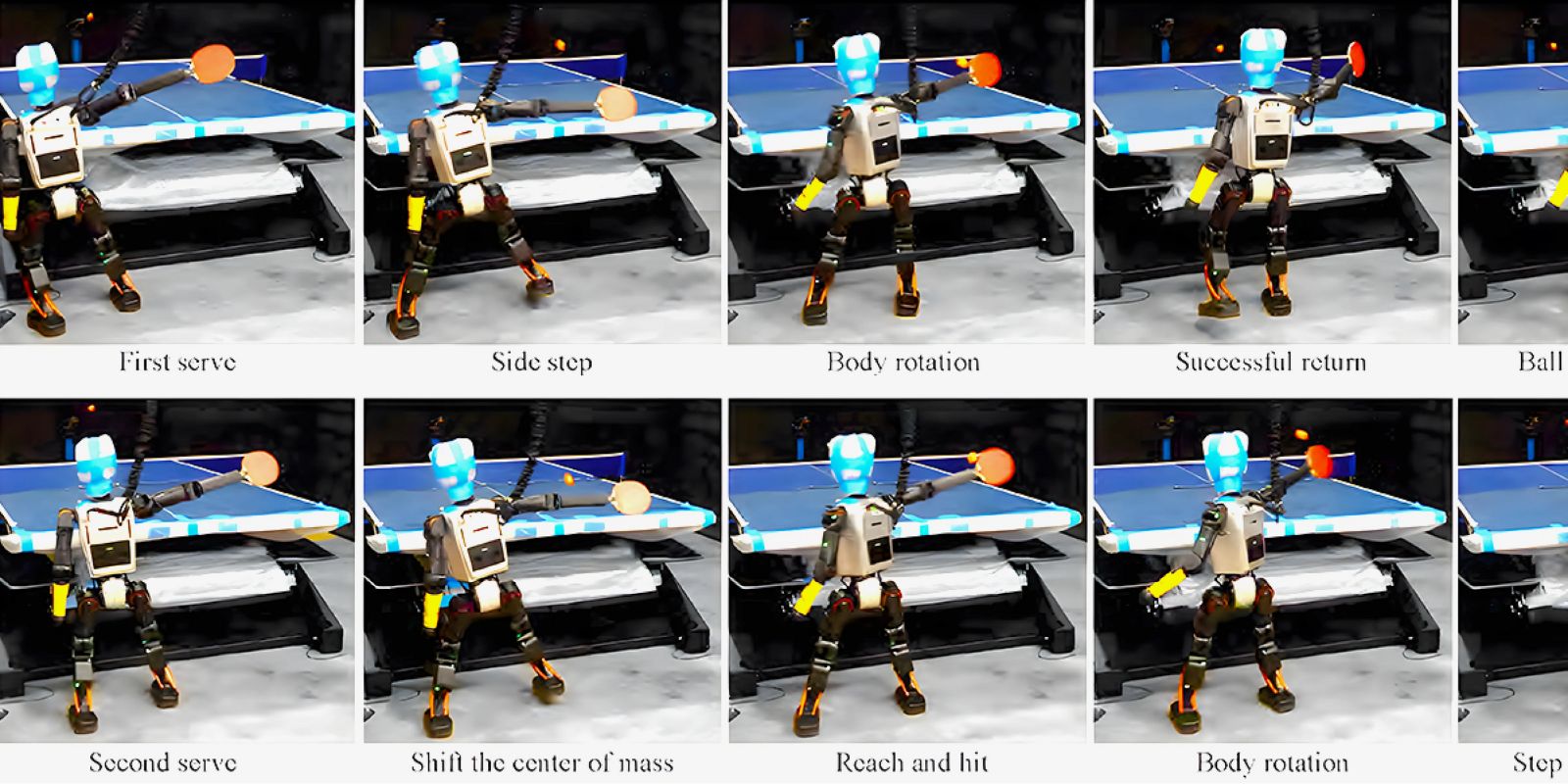
Beyond force capabilities, T1 meets agility requirements. A reference study on table tennis (arXiv publication) illustrates its whole-body reflexes and coordination. The robot intercepts fast balls thanks to real-time perception and consistent motion planning: footwork, lateral and forward–backward motions, arm–torso synchronisation. Policies trained in simulation are deployed zero-shot on the real robot with robust results.
Why is this useful for a university or a lab?
These metrics confirm the relevance of T1 for high-frequency perception–action, RL for agile tasks and biomechanics of motion studies. Teams can investigate reactivity, trajectory prediction and multi-segment coordination while relying on a stable hardware base.
Key takeaway: dedicated tools, smooth sim-to-real transfer and fast training: fewer frictions, more iterations.
The added value of T1 also lies in its software ecosystem. The goal is to minimise “glue” engineering and speed up the hypothesis → experiment → analysis loop.
Recommended workflow (lab practice)
1. Design and train in simulation (synthetic data, domain randomisation, sensor noise).
2. Validate in hardware-in-the-loop (HIL) on T1, instrumenting effort and stability metrics.
3. Deploy and iterate on the real robot, with recordings, replays and targeted adjustments (policies and gains).
Impact on research cycles
This pipeline shortens the time between an idea and validation on the robot. PhD students gain in experimental cadence. Supervisors benefit from reproducible protocols and consistent metrics.
Key takeaway: a stable platform reduces experimental variance and improves comparability across teams.
Scientific performance also depends on reliable engineering foundations. T1 provides a coherent architecture (sensors, actuators, time synchronisation) and a readable software stack, which facilitates:
This stability is a major lever for solid publications and replication beyond the original lab.
Key takeaway: the platform covers a broad spectrum, from loco-manipulation to fast perception.
Key takeaway: Booster T1 is not just a high-performance humanoid; it is a research platform that enables faster and cleaner results.
By combining proven hardware, force control for loco-manipulation, agility for perception–action tasks and a software ecosystem geared towards sim-to-real transfer, T1 provides a robust framework for academic teams. Work on generalizability (policy transfer to other humanoids) further reinforces its relevance as a comparison baseline and as a tool for producing results. For labs wanting to accelerate their work on control, RL, contact planning and physical interaction, Booster T1 is a structuring choice: it reduces integration overhead, improves reproducibility and accelerates the path from concept to real robot.

Marine Senecat
Content Manager at Generation Robots