Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Alle Ihre Angebote sind über Ihr Kundenkonto zugänglich.
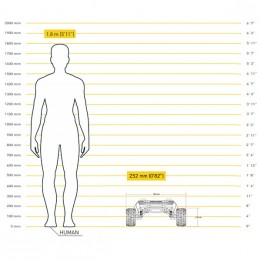
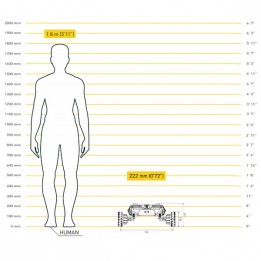
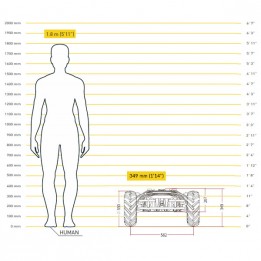
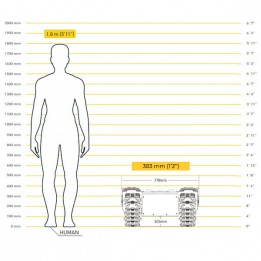
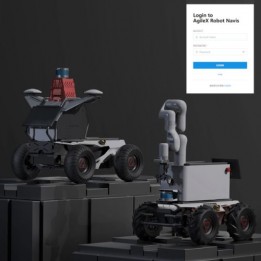
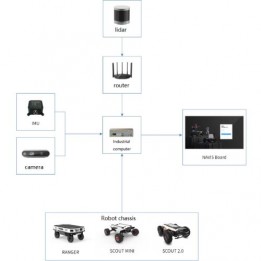
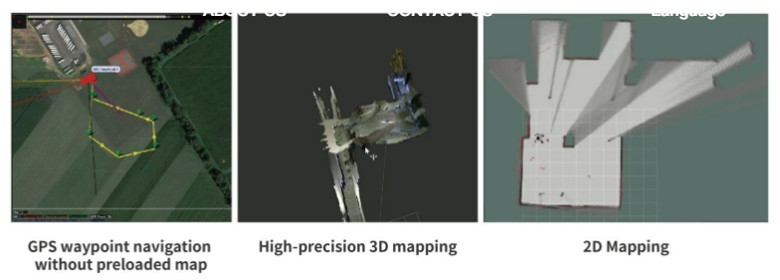
Das Agilex Autopilot Kit bietet ein umfassendes System, das die autonome GPS-Navigation eines leistungsfähigen Roboterchassis gewährleistet. Programmierbar auf Linux, ist diese Plattform zu 100 % mit ROS kompatibel, um die Entwicklung eines breiten Spektrums an Anwendungen zu ermöglichen.


Das Agilex Autopilot Kit bietet ein umfassendes System, das die autonome GPS-Navigation eines leistungsfähigen Roboterchassis gewährleistet. Programmierbar auf Linux, ist diese Plattform zu 100 % mit ROS kompatibel, um die Entwicklung eines breiten Spektrums an Anwendungen zu ermöglichen.