Vorhang auf für die Servomotoren Dynamixel Pro!

In der Welt der Robotik gelten die digitalen Servomotoren Dynamixel als Superstars. Diese Servomotoren finden bei den meisten der weltweit erzeugten Roboter Anwendung. Die Servomotoren Dynamixel sind einfach in der Handhabung, leistungsstark, präzise und vor allem bieten sie zahlreiche Funktionalitäten. Darüber hinaus können sie mit einer Vielzahl verschiedener Programmiersprachen programmiert werden (C#, Java, Python, Labview, Matlab …).
Die Dynamixel Servomotoren teilen sich in 3 große Familien auf, die untereinander nicht (oder kaum) kompatibel sind:
- Die Servomotoren XL-320 sind Mini-Servomotoren mit niedriger Leistung, die beim Roboter Darwin Mini zum Einsatz kommen.
- Servomotoren der Serie AX oder MX haben dasselbe Kommunikationsprotokoll und werden häufig gemeinsam auf einem Roboter (Darwin-OP, Poppy …) eingesetzt. Sie sind die gebräuchlichsten Servomotoren. Von AX-12A bis MX-106 steht eine ganze Reihe von Servomotoren mit unterschiedlichen Geschwindigkeiten oder Drehmomenten zur Verfügung.
- Und schließlich die Servomotoren Dynamixel Pro für professionelle Anwendungen.
Servomotoren Dynamixel Pro
Die Servomotoren Dynamixel Pro eignen sich perfekt für Roboter menschlicher Größe, egal ob mobile Roboter, Maschinenarme oder Humanoide. Dynamixel Pro Servomotoren sind präziser und schneller als die klassischen Dynamixel Servomotoren der Baureihe MX.
Wie aus der folgenden Darstellung ersichtlich ist, handelt es sich beim Dynamixel Pro um eine Kombination aus Motor, Untersetzung und Controller. Wie die klassischen Dynamixel Servomotoren lassen sich die Servomotoren Dynamixel Pro einfach anstecken und auch einfach programmieren.
Sie verfügen über eine Geschwindigkeits-, Positions- und Drehmomentsteuerung, was sie von zahlreichen anderen Servomotoren unterscheidet.
Genau wie die Dynamixel Servomotoren der Baureihe MX, können auch Dynamixel Pro per „Daisy Chain“ miteinander verkabelt werden und über eine einzige Identifikationsnummer für jeden Servomotor im Netz programmiert werden.
Hier ist das offizielle Präsentationsvideo der Baureihe Dynamixel Pro zu sehen:
Einsatzbeispiele für die Servomotoren Dynamixel Pro
Erkundungsroboter der Universität Bonn
Die Abteilung für Autonome Intelligente Systeme am Institut für Informatik VI der Universität Bonn nahm mit einem Rover mit Maschinenarm, der mithilfe von Dynamixel Pro Servomotoren realisiert wurde, am DLR SpaceBot Cup 2015 teil. Im folgenden Video sind die Fähigkeiten dieses Roboters hinsichtlich Exploration und mobiler Manipulation zu sehen:
Mehr dazu unter: http://www.ais.uni-bonn.de/nimbro/Centauro/
Humanoider Roboter Thor-OP
Mehrere amerikanische Universitäten, darunter das renommierte Laboratorium Romela (von dem bereits der Roboter Darwin-OP stammt) nehmen gemeinsam an der Darpa Robotics Challenge teil. Gemeinsam entwickelten sie hierfür einen humanoiden Roboter von menschlicher Größe, den sie THOR-OP nannten. Im gesamten oberen Körperbereich dieses Humanoiden wurden Dynamixel Pro Servomotoren verwendet.

Weitere Informationen finden Sie unter: http://www.thordrc.com/
Verschiedene Dynamixel Pro Servomotoren
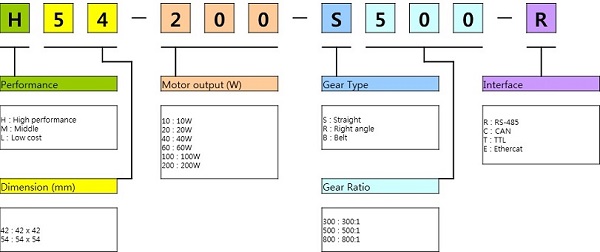
Zu Beginn des Jahres 2015 bot der Hersteller Robotis ein knappes Dutzend Dynamixel Pro Servomotoren an. Die Bezeichnung der Servomotoren ist eine Kodifizierung, die aus der Positionierung des jeweiligen Servomotors innerhalb der Baureihe hervorgeht. Die folgende Abbildung macht das deutlich:
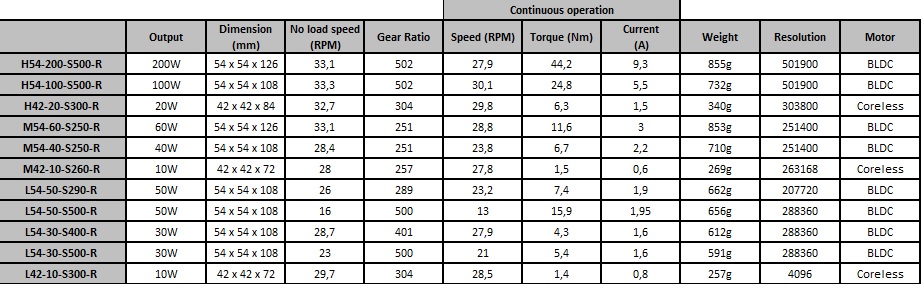
In der folgenden Tabelle werden die Leistungen der verschiedenen Dynamixel Pro Servomotoren verglichen:
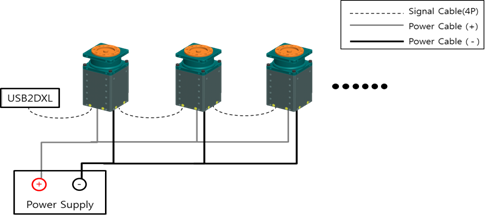
Verbindung und Stromversorgung der Servomotoren Dynamixel Pro
Die Stromzufuhr für die Dynamixel Pro Servomotoren erfolgt mittels 4-poliger Dynamixel-Kabel (wie bei den Servomotoren Dynamixel MX-28R, MX-64R bzw. MX-106R sowie deren Untergruppen MX-28AR, MX-64AR und MX-106AR). Das ‘R’ gibt an, dass die Kommunikation dieser Servomotoren mit dem seriellen Protokoll RS-485 erfolgt. Das gilt auch für die Dynamixel Pro Servomotoren. Daraus ergibt sich, dass sie dieselben 4-poligen Kabel verwenden.
Im Gegensatz zu den anderen Dynamixel Servomotoren werden Dynamixel Pro Servomotoren mit 24 V versorgt. Jeder Servomotor benötigt eine eigene Stromversorgung (die einzelnen Servomotoren wie bei der Baureihe MX per Daisy Chain miteinander zu verkabeln, reicht nicht aus).
Die Servomotoren Dynamixel Pro 54 verfügen über einen externen Anschluss (Molex-Steckverbinder) für die Stromversorgung, während die Stromzufuhr für Servomotoren vom Typ 42 ausschließlich über das 4-polige Kabel erfolgt.
Programmierung der Dynamixel Pro Servomotoren
Die Programmierung erfolgt über das Protokoll DXL 2.0, das sich von jenem für die Servomotoren der Serie AX oder MX unterscheidet. Allerdings wird dieses neue Protokoll mit dem Mini-Servomotor XL-320 geteilt.
Mehr dazu unter http://support.robotis.com/en/techsupport_eng.htm#product/dynamixel_pro.htm
Einführungshandbuch für Dynamixel Pro: http://www.generationrobots.com/media/Dynamixel-Pro-Quick-Start-en.pdf