La recherche du maximum d’information sur l’environnement est une quête perpétuelle en robotique. Parmi ces informations, la mesure de distance est fondamentale pour un robot.
Les sonars à ultrasons sont très couramment utilisés pour la mesure de distance en robotique mobile car ils sont peu chers et faciles à manipuler. Ils sont également utilisés pour l’évitement d’obstacles, la navigation et ce que l’on appelle le Map building.
Cet article propose un focus sur cette technologie des capteurs ultrasons, quels sont ses avantages et ses limites, comment s’en sert-on et quelles sont les différences entre les capteurs proposés pour un même robot.
Les différentes manières de se repérer utilisant un signal
Avant de s’intéresser plus précisément aux capteurs ultrasons, voyons quelles sont les autres technologies disponibles. Tous les capteurs permettent de se représenter l’environnement (contact, odométrie, sensibilité à la lumière, au son, à la chaleur…). Certains capteurs permettent de mesurer à distance les obstacles et ainsi permettre au robot de prendre une décision en fonction des obstacles (ou l’absence d’obstacle autour de lui). On parle alors de télémètre , c’est-à-dire la mesure à distance d’un point éloigné.
Découvrez nos télémètres Laser :
- Télémètres Laser HOKUYO
- Télémètres Laser SICK
- Télémètres Laser YDLIDAR
- Télémètres Laser ROBOSENSE
- Télémètres Laser OUSTER
Outre les capteurs ultrasons, trois autres technologies de télémétrie permettent d’effectuer ces mesures :
- L’infrarouge
- Le Laser
- La technologie Temps de Vol (TOF)
Voici un tableau présentant les principaux avantages et inconvénients des différentes solutions dans le cadre des solutions proposées par les constructeurs de robots mobiles tels que présentés sur ce site.
| Ultrason | Infrarouge | Laser | Temps de vol | |
| Portée | De 1 à 250 cm | De 5 à 80 cm | Plusieurs mètres à plusieurs dizaines de mètres selon les modèles. | 20 cm à 14 m (5/6m au soleil) |
| Directivité | Cône d’environ 30° | Cône d’environ 5° | Les plus directifs (de l’ordre du degré, voire du demi-degré) | Cône d’environ 3° |
| Précision | Relativement précis mais la précision diminue avec la distance, l’angle de mesure et les conditions de température et de pression. | Relativement précis mais la précision diminue avec la distance. | Sont précis avec un bruit de quelques centimètres sur des mesures de plusieurs mètres. | Jusqu’à +/- 4 cm en mode précision. |
| Coût | Peu chers | Peu chers | Relativement chers | Peu chers |
| Sensibilité aux interférences | Sensible à la température et à la pression. Egalement sensible aux autres robots utilisant la même fréquence ce qui peut poser problème dans une compétition. | Sont sensibles aux fortes sources de lumière qui contiennent un fort rayonnement infrarouge.Sont également sensibles à la couleur et à la nature des obstacles. | Ne peut pas détecter les objets réfléchissant la lumière laser (vitres, objets chromés,…) | Peu sensible aux interférences, s’utilise dans des environnements variés |
Caractéristiques physiques et techniques des capteurs à ultrasons
Son et ultrasons ?
Le son est une onde mécanique et élastique se propageant dans un milieu physique sous forme d’ondes longitudinales ou de compression. Ce phénomène est par exemple mis à profit par les hauts parleurs qui font vibrer une membrane qui à son tour fait vibrer l’air. Le son se propage d’autant plus vite que le milieu est dense, ce qui explique que le son soit plus rapide sous l’eau que dans l’air. Ceci explique également que les capteurs ultrasons ne fonctionnent pas dans le vide car le son ne s’y propage pas. Vous ne verrez donc pas de capteurs ultrasons sur les sondes spatiales ou sur les rovers lunaires.
Les ultrasons ont une fréquence supérieure à 20 000 Hz et sont donc inaudibles par l’homme (d’où leur nom).
On distingue deux types d’ultrasons selon la gamme de fréquence :
- Les ultrasons de faible puissance qui sont utilisés pour la mesure de distance (télémétrie), le contrôle non destructif, l’échographie et l’acoustique sous-marine. C’est ce type d’ultrasons qui nous intéresse ici
- Les ultrasons de forte puissance qui modifient le milieu dans lequel ils se propagent. Leur action dépend du milieu dans lequel ils se propagent. Ces actions peuvent être mécanique, thermique ou chimique.
Les ultrasons dans la nature
De nombreux animaux peuvent entendre les ultrasons comme le chien ou la chauve-souris. La chauve-souris a aussi la particularité de pouvoir en émettre dans le but de se repérer, on parle d’écholocalisation. C’est exactement ce principe qui est repris par les robots que nous programmons. D’autres animaux ont cette faculté (les cétacés, les chiroptères ou certains rongeurs). Ils utilisent les ultrasons non seulement pour se repérer mais aussi pour localiser leurs proies et aussi communiquer.
| L’information Society Technology, a créé le robot Bat-Bot afin de mieux comprendre les processus d’écholocalisation. En effet, si l’écholocalisation dans l’eau est bien maîtrisée, au travers du sonar, elle l’est bien moins dans l’air. L’objectif du projet CIRCE, mené par l’université d’Anvers, est de mieux comprendre ces phénomènes et permettre de proposer par la suite des capteurs ultrasons beaucoup plus évolués et performants que ceux que l’on trouve sur le marché. En effet, comme nous le verrons plus loin, ces capteurs sont simples et rapides à mettre en œuvre mais posent des problèmes lorsque la complexité du milieu augmente. |
L’homme a mis à profit l’écholocalisation dans diverses activités. L’une des plus connue est l’échographie qui permet de voir certains tissus vivants en fonctionnement (par exemple le fœtus dans le ventre de la mère ou les ligaments des articulations). L’autre utilisation très connue est le sonar utilisé par les navires militaires et les sous-marins.
Le capteur ultrason
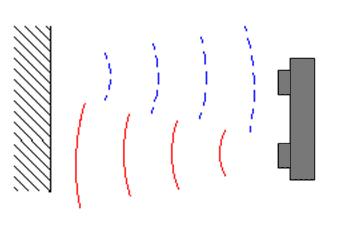
Les capteurs ultrasons fonctionnent en mesurant le temps de retour d’une onde sonore inaudible par l’homme émise par le capteur. La vitesse du son étant à peu près stable, on en déduit la distance à l’obstacle.
Caractéristiques physiques et techniques des capteurs ultrasons
Les capteurs ultrasons fournis ont souvent la forme d’une paire d’yeux car il y a deux parties essentielles :
- L’émetteur
- Le récepteur
L’émetteur émet un son à une fréquence définie (généralement autour de 40 kHz) et le récepteur collecte le son répercuté par les obstacles. La distance aux objets est calculée par le temps mis par le son pour revenir au récepteur.
La forme du faisceau est caractéristique du capteur utilisé. La Figure 1 présente une forme typique de faisceau d’ultrasons.
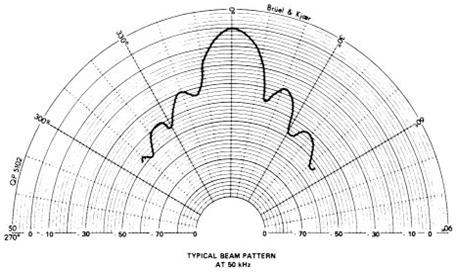
On remarque que l’angle effectif de fonctionnement est d’environ 30° (ce qui est important comparé aux autres types de capteurs) avec des lobes secondaires moins importants de part et d’autre. La mesure sera ainsi plus précise dans le cône central de 30° et sera moins précise sur les parties latérales. Ceci explique que généralement les capteurs ultrasons sont montés sur les parties rotatives afin que différentes mesures puissent être effectuées en utilisant la partie centrale du cône de visualisation.
La largeur du cône (30°) constitue à la fois un avantage et un inconvénient. C’est un inconvénient car un obstacle détecté n’est pas localisé précisément au sein du cône de détection. La mesure de position est donc relativement imprécise. C’est au contraire un avantage car cela permet de mieux balayer l’environnement et des éléments fins comme le pied d’une chaise seront détectés à coup sûr.
La figure ci-dessous présente trois cas de mesure classique.
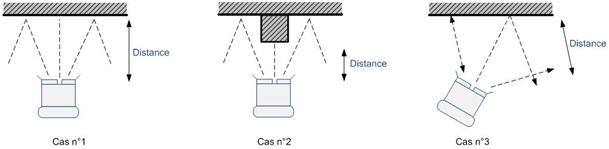
Le premier cas générera une mesure précise car le capteur est bien en face et perpendiculaire à l’obstacle.
Le cas n°2 générera également une mesure précise mais donnera une « vue » de l’obstacle situé directement en face du capteur.
Le cas n°3 en revanche va générer une mesure imprécise étant donné que c’est la partie latérale gauche du capteur qui procède à la mesure.
Il est essentiel de bien connaitre la structure du faisceau pour le capteur que l’on utilise si l’on souhaite faire du Map Building ce qui est moins le cas pour l’évitement d’obstacle.
Il faut également tenir compte du fait qu’à très courte distance, les capteurs ultrasons sont aveugles. Ceci est dû à la temporisation entre l’émission de l’onde sonore et de début de la détection de l’onde réfléchie qui est nécessaire pour ne pas perturber cette mesure.
Quelques limitations des capteurs ultrasons
La forme des obstacles joue un rôle essentiel car elle peut amener le robot à ne pas se représenter correctement son environnement.
> La forme des obstacles
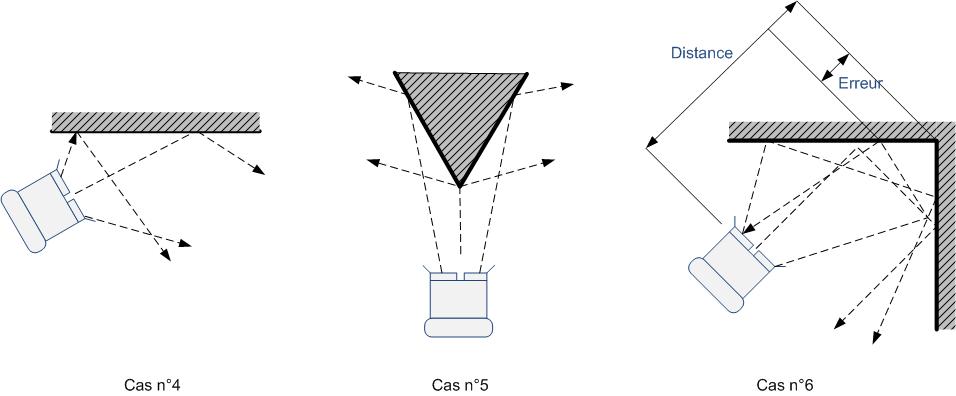
Comme le montre la figure ci-dessus, il faut tenir compte des erreurs générées par la forme des obstacles.
> La texture de l’obstacle
Elle joue également un rôle important. Un mur recouvert de moquette réfléchira moins bien l’onde qu’un mur recouvert de peinture uniquement.
> Le cross-talk
Deux capteurs ultrasons ne peuvent pas être utilisés côte à côte car dans ce cas, il n’est pas possible, s’ils ont la même fréquence, de distinguer lequel des deux a émis une onde. On parle de phénomène de cross-talk.
Une autre solution pour un robot qui possède plusieurs capteurs ultrasons, c’est d’activer les capteurs les uns après les autres, ce qui diminue le taux de rafraîchissement global.
> Perceptual aliasing
Parmi les autres types de limitation que l’on peut citer, il convient de ne pas oublier le problème de l’alias perceptif (« perceptual aliasing »). Ce problème se produit lorsqu’il existe plusieurs situations ambiguës dans lesquelles le robot ne peut pas choisir à coup sûr l’action optimale à effectuer par manque d’information sur l’environnement. Par exemple, si le capteur ultrason permet à un robot de se situer le long d’un mur, il ne permet pas de savoir la plupart du temps où il se situe le long de ce mur ? Est-ce à la fin, au milieu ou au début ? Deux mesures effectuées le long de ce mur donnent les mêmes indications (à moins que le robot n’arrive au bout et qu’il détecte l’absence ou la présence d’un coin).
Ce problème désigne donc l’incapacité du capteur à distinguer de manière unique tous les lieux d’un environnement.
Pour contourner ce problème, plusieurs algorithmes sont possibles, des algorithmes à base d’apprentissage, de mémoire,…
La manière de programmer son robot et la multiplication des capteurs constituent des moyens efficaces de minimiser ces effets de bord.
Exemples de mise en œuvre de capteurs ultrasons en robotique
Voici quelques vidéos qui montrent des exemples de mise en œuvre des capteurs ultrasons par des robots mobiles.
Evitement d’obstacle
Dans cette vidéo, le robot se dirige vers l’endroit qui est le plus dégagé. Le robot mobile Boe-bot a été utilisé ici.
Radar
Ici le concepteur a programmé son robot afin qu’il soit statique mais qu’il utilise le capteur ultrason comme un radar. Il affiche sur l’écran de la brique intelligente Lego Mindstorms EV3 les éléments qu’il rencontre.
Les différents capteurs ultrasons pour les robots mobiles
Nous nous concentrerons ici sur les capteurs proposés dans les gammes robotiques proposées par Génération Robots.
Lego Mindstorms EV3

|
Ce capteur est inclus dans le kit Lego Mindstorms EV3.
Les caractéristiques officielles du produit sont les suivantes :
|
Les améliorations qui ont pu être relevées sur le capteur par rapport à sa version NXT sont :
- Possibilité d’effectuer des mesures entre 1 et 3cm
- Le capteur ultrason peut maintenant être utilisé comme sonar
Test du capteur Lego Mindstorms
- Les mesures inférieures à 3 cm ne peuvent être effectuées. Cela correspond au problème du temps de retour nécessaire de l’onde.
- Les mesures jusqu’à 20 cm sont relativement assez précises dans un angle compris entre -8° et +30°. En effet, le récepteur est à gauche et l’émetteur est à droite, ce qui explique que les mesures effectuées à gauche sont moins précises que les mesures effectuées à droite.
- Entre 20 et 80cm les mesures restent faisables mais avec une erreur inférieure à 8%, ce qui n’est pas si mal pour un capteur de ce type.
Télémètre ultrason Grove

|
Ce capteur très populaire se raccorde à votre Arduino par le biais d’une platine Grove pour un prototypage facilité. Le capteur ultrason Grove est capable de vous garantir une performance d’un niveau industriel : une portée de 3 cm à 4 m, avec une résolution de 1 cm. |
- Fréquence : 40 kHz
- Portée de détection : 3cm – 4m
- Résolution : 1cm
- Dimensions : 43x25x15mm
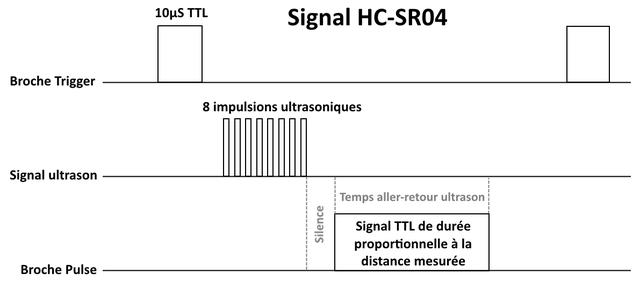
Capteur sonar à Ultrasons HC-SR04 : la précision à coût (très) réduit

|
Le capteur sonar à Ultrasons HC-SR04 conviendra très bien pour vos prototypages. Facile à utiliser avec Arduino et compatible Raspberry Pi , il offre une très bonne plage de détection, avec des mesures stables et de haute précision pour un capteur à ultrason de ce prix (3,95€). |
Il détectera des obstacles dans un angle de visée de 15°, et d’une portée de 2 à 500 cm. L’écart est de 3 cm avec un obstacle à 2 m, donc une marge d’erreur inférieure à 2 %.
Pour un coût très bas, le capteur à ultrason HC-SR04 donne des résultats étonnants de précision !
- Angle de mesure: <15°
- Gamme de distance : 2cm – 500 cm
- résolution : 1cm
Capteur de distance TeraRanger Duo : TOF + ultrason

|
Le capteur TeraRanger est un capteur temps de vol. Si vous n’êtes pas encore familier avec la technologie ToF, quelques mots d’explication : un capteur de distance ToF émet un éclair de lumière avec une photodiode et calcule le temps nécessaire à ce flash pour atteindre l’objet visé et revenir au capteur : la distance capteur-cible est automatiquement déduite du « temps de vol ».
Le capteur TeraRanger Duo combine la technologie TOF et ultrason ! |
Ce capteur est un réel compromis entre la précision d’un capteur laser et les avantages des capteurs à ultrasons sans pour autant avoir les inconvénients de perturbations lorsque l’on utilise plusieurs capteurs.
Vex Robotics

|
Ce capteur n’est pas inclus dans les kits de base.
Les caractéristiques techniques de ce capteur sont les suivantes :
|
Ce capteur nécessite le kit VEX de programmation Robot C qui est inclus dans les kits VEX vendus sur Génération Robots.
Un exemple d’utilisation du capteur ultrasons avec un robot Vex :
Parallax

|
Ce capteur n’est pas inclus dans les kits de base mais est disponible séparément. Il est adaptable à la fois sur les Boe-Bot et les Sumobot
Les caractéristiques techniques de ce produit sont :
|
L’émetteur se trouve à droite et le récepteur à gauche lorsqu’on regarde le capteur de face (comme présenté dans la figure ci-dessous).
Conclusion
Les capteurs ultrasons sont faciles à manipuler et permettent, combinés à d’autres capteurs, d’apporter des informations très utiles sur l’environnement du robot. A n’en pas douter, vos robots auront un ou plusieurs capteurs de ce type !
Génération Robots ( https://www.generationrobots.com )
Tout usage et reproduction soumis à autorisation explicite préalable.