Um Ihnen dabei zu helfen, die häufigsten Probleme mit dem Thymio 2 Lernroboter zu beheben, haben wir diesen kleinen Leitfaden zusammengestellt, mit dem Sie die Funktionsweise der meisten Sensoren und Aktoren Ihres Thymio 2 überprüfen können.
Der Thymio überrascht uns immer wieder aufs Neue, ob mit seiner digitalen Malkunst oder seiner Fähigkeit, sich in Tiere zu verwandeln (Link zu Produktinfo). Manchmal gibt es jedoch auch böse Überraschungen. Denn obwohl dieser Roboter robust gebaut ist, können Defekte auftreten.
Um Ihnen dabei zu helfen, die häufigsten Probleme zu beheben, haben wir diesen kleinen Leitfaden zusammengestellt, mit dem Sie die Funktionsweise der meisten Sensoren und Aktoren Ihres Thymio 2 überprüfen können.
Sollte Ihr mobiler Roboter Thymio sich nicht einschalten lassen oder beim Anschließen per USB nicht erkannt werden, so konsultieren Sie bitte
den Abschnitt “Behebung der häufigsten Probleme” am Ende dieses Leitfadens.
Vorbereitung des Thymio Lernroboters
- Den Thymio an Ihre USB-Schnittstelle anschließen und Aseba Studio starten
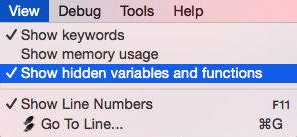
- Überprüfen, dass die automatische Aktualisierung (Auto) aktiviert ist
- Die im Ansichtsmenü (View) verborgenen Variablen hinzufügen
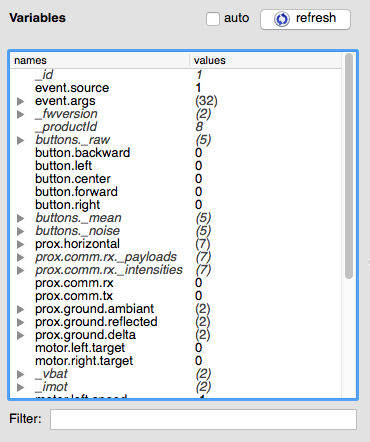
- Sie sollten jetzt die nachstehende Anzeige sehen:
Firmware-Überprüfung
Durch Ansicht der Variable ‘_fwversion’ erhalten Sie die Versionsnummer der Firmware. Die aktuelle Version ist 8 (im ersten Feld [0]). Sollte dies nicht die angezeigte Version sein, so empfehlen wir Ihnen, die Firmware zu aktualisieren. Dazu beachten Sie bitte die Anweisungen auf der Website von Thymio & Aseba (vergessen Sie nicht, Aseba Studio zu schließen, bevor Sie mit der Aktualisierung beginnen!)
Überprüfung der Entfernungsmesser
Lokalisierung
Sieben Entfernungsmesser sind rund um den Thymio angebracht: fünf vorne, zwei hinten.
Überprüfung
Um diese Sensoren zu überprüfen, ist es am einfachsten, die Hand vor jeden Sensor zu halten und sicherzustellen, dass diese korrekt reagieren. Die Sensoren Nummer 5 und 6 sind hinten positioniert.
Werte
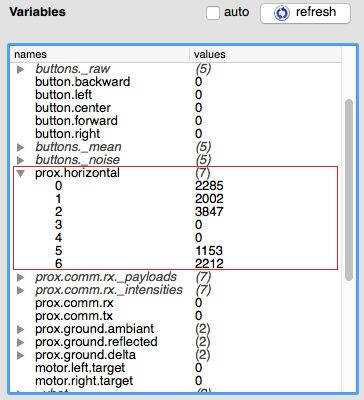
Die erhaltenen Messwerte der Sensoren sind in den Variablen ‘prox.horizontal’ abzulesen. Bedeutung der Messwerte dieser Sensoren:
- 0 => kein Hindernis erkannt
- Ca. 4000 => das Hindernis befindet sich in unmittelbarer Nähe des Sensors, ohne ihn zu berühren
Überprüfung der Sensoren für die Linienfolge
Lokalisierung
Der Thymio besitzt zwei Linienfolgesensoren vorne unter dem Roboter.
Funktionsweise
Der Roboter erkennt einerseits die Helligkeit (‘prox.ground.ambiant’) und andererseits das vom Boden reflektierte Licht (‘prox.ground.reflected’). Durch Ermittlung der Differenz zwischen den beiden (‘prox.ground.delta’) kann der Thymio das Vorhandensein oder Fehlen eines Bodens erkennen.
Werte
- Ca. 0 => Thymio weit vom Boden
- Positiver Wert => Thymio am Boden
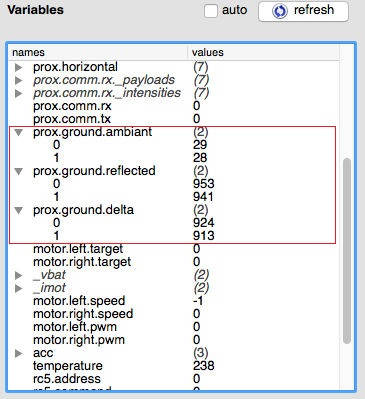
ACHTUNG: Dieser positive Wert ist je nach Art des Bodens unterschiedlich (ca. 20 bei schwarzen Böden, 1000 bei weißen).
Überprüfung des Mikrofons
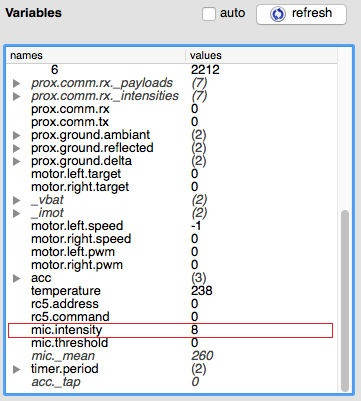
Es handelt sich um die Variable ‘mic.intensity’. Wenn nicht gerade absolute Stille herrscht, so liegt dieser Wert stets leicht über 0 (zwischen 5 und 10 in ruhiger Umgebung). Tippen Sie mit den Fingern auf den Roboter, so sehen Sie den Wert um einige Dutzend hochschnellen (bis ca. 200).
Überprüfung des Beschleunigungssensors
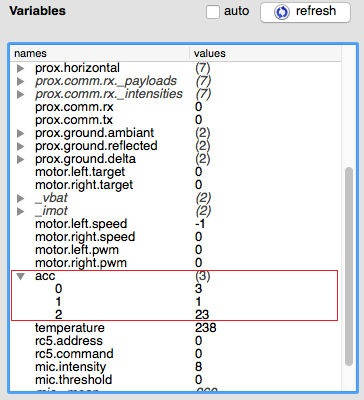
Der Beschleunigungsmesser ist an der Variable ‘acc’ abzulesen.
Werte
Die drei Werte entsprechen den 3 Achsen.
- Wenn Ihr Thymio normal auf dem Boden steht, so ist der letzte Wert hoch (rund 20-25) und die beiden anderen nahe 0. Der hohe Wert entspricht der Beschleunigung aufgrund der Schwerkraft.
- Wenn Ihr Thymio nach oben zeigt, so liegt der zweite Wert um die 20, die anderen um 0.
- Und wenn Sie Ihren Roboter auf die Seite legen, so liegt der erste Wert bei 20 (oder -20, je nachdem, auf welcher Seite er liegt) und die anderen um 0.
Überprüfung der Motoren und Geschwindigkeitsmesser
Überprüfung der Geschwindigkeitsmesser
Die Variablen ‘motor.left.speed’ und ‘motor.right.speed’ geben die Drehgeschwindigkeit der Räder an.
Messwert
- 0 => Räder im Ruhezustand (manchmal mit leichter Abweichung zwischen 1 und 5)
Wenn Ihr Thymio nicht geradeaus fährt, dann kann das Problem mit dieser Abweichung zusammenhängen.
Um diesem Problem abzuhelfen, empfehlen wir Ihnen, die Kalibrierung wie auf der Website von Thymio & Aseba.
Hier ein Video zur Erläuterung des Kalibrierverfahrens:
Überprüfung von Motoren
Um die Motoren Ihres Thymio zu testen, legen Sie den Roboter auf den Rücken und geben den nachstehenden Code ein:
motor.right.target=100
motor.left.target=100
Dann kann das Programm geladen und gestartet werden. Die Räder sollten sich nun mit derselben Geschwindigkeit drehen. Die Geschwindigkeitsmesser zeigen einen Wert um 100 an (er kann aufgrund von Lärm zwischen 80 und 120 liegen).
Laden und starten Sie das nachstehende Programm, um den Roboter zu stoppen:
motor.right.target=0
motor.left.target=0
Überprüfung der Tasten
Lokalisierung
Der Thymio besitzt 5 Tasten auf der Oberseite, die den Variablen ‘button.backward’, ‘button.forward’ , ‘button.left’, ‘button.right’ und ‘button.center’ entsprechen.
Werte
- 0 => die Taste ist nicht gedrückt
- 1 => die Taste ist gedrückt
Überprüfung
Überprüfen Sie, ob der Wert jeder Taste auf 1 wechselt, wenn diese gedrückt wird (Taste gedrückt halten, bis Aseba Studio den Status der Sensoren aktualisiert).
Behebung der häufigsten Probleme
Die beiden wichtigsten Probleme, die beim Thymio auftreten können, sind:
Ihr Roboter wird nicht mehr geladen
- 1. Überprüfen Sie zunächst, ob das USB-Kabel defekt ist. Verwenden Sie zum Test ein anderes Kabel (die meisten Smartphones besitzen ein Mikro-USB-Kabel desselben Formats wie der Thymio).
- 2. Sollte das Problem weiter bestehen, so ist der Akku des Thymio komplett entleert (oder aber defekt, in diesem Fall ist unser Kundendienst zu kontaktieren).
Um den Thymio aus diesem Engpass zu befreien, verwenden Sie ein USB-Netzgerät (oft im Lieferumfang von Smartphones oder Tablets enthalten). Diese Ladegeräte liefern normalerweise 5 V-Strom mit 1 A (statt 500 mA bei der USB-Schnittstelle eines Computers). - Roboter anschließen und die Reset-Taste drücken (das kleine Loch auf der linken Seite). Anschließend den Roboter 2 Stunden aufladen.
Ihr Roboter lässt sich nicht ordnungsgemäß einschalten, verhält sich sprunghaft oder schaltet die USB-Verbindung endlos ein und aus
Es handelt sich wahrscheinlich um eine Firmware-Störung, die in diesem Falle aktualisiert werden muss. Folgen Sie den Anweisungen auf der Website von Thymio & Aseba.
Versuchen Sie es ruhig mehrmals, falls es nicht gleich beim ersten Mal klappt!
Auf dieser Seite finden Sie weitere Details zur Problembehebung beim Thymio.