-
 Visitez notre boutique
Visitez notre boutique
-
Français
À retenir : le Booster T1 fournit une base matérielle et logicielle prête, pour consacrer plus de temps à l’algorithmique et à l’expérimentation.
La robotique humanoïde est exigeante : stabiliser la mécanique, l’équilibrage, la perception et la pile logicielle prend des mois. Ce travail est nécessaire, mais détourne souvent les équipes de la recherche centrale. Le Booster T1 propose une alternative pragmatique : une plateforme humanoïde robuste, déjà intégrée, et un écosystème logiciel pensé pour le transfert simulation-vers-réel (sim-to-real). Les chercheurs et étudiants peuvent ainsi se concentrer sur le contrôle, la perception et l’apprentissage, plutôt que sur l’infrastructure.
À retenir : le T1 combine locomotion et manipulation, avec un contrôle d’effort précis et tolérant aux perturbations.
Le Booster T1 a été validé sur des tâches de loco-manipulation (se déplacer tout en interagissant physiquement). Des travaux menés avec FALCON (framework d’apprentissage par renforcement — Reinforcement Learning, RL) à Carnegie Mellon montrent une exécution stable sur des scénarios réels. Le robot ouvre des portes, tire des charges, transporte des objets, et adapte sa posture face à des efforts inconnus. Les politiques de contrôle testées sur T1 ont aussi été transférées sur d’autres humanoïdes (ex. Unitree G1), ce qui soutient la généralisabilité des méthodes.
Pourquoi c’est utile pour une une université ou un labo ?
Ces conditions couvrent des cas récurrents en environnements semi-structurés : accès aux salles, déplacement d’outillages, manipulation d’ouvrants, assistance logistique légère. Le T1 fournit une base répétable et mesurable pour tester des stratégies de contrôle d’effort, de planification de contacts et de collaboration physique homme-robot.
À retenir : le T1 gère des tâches rapides, coordonnées, avec une boucle perception-action réactive.
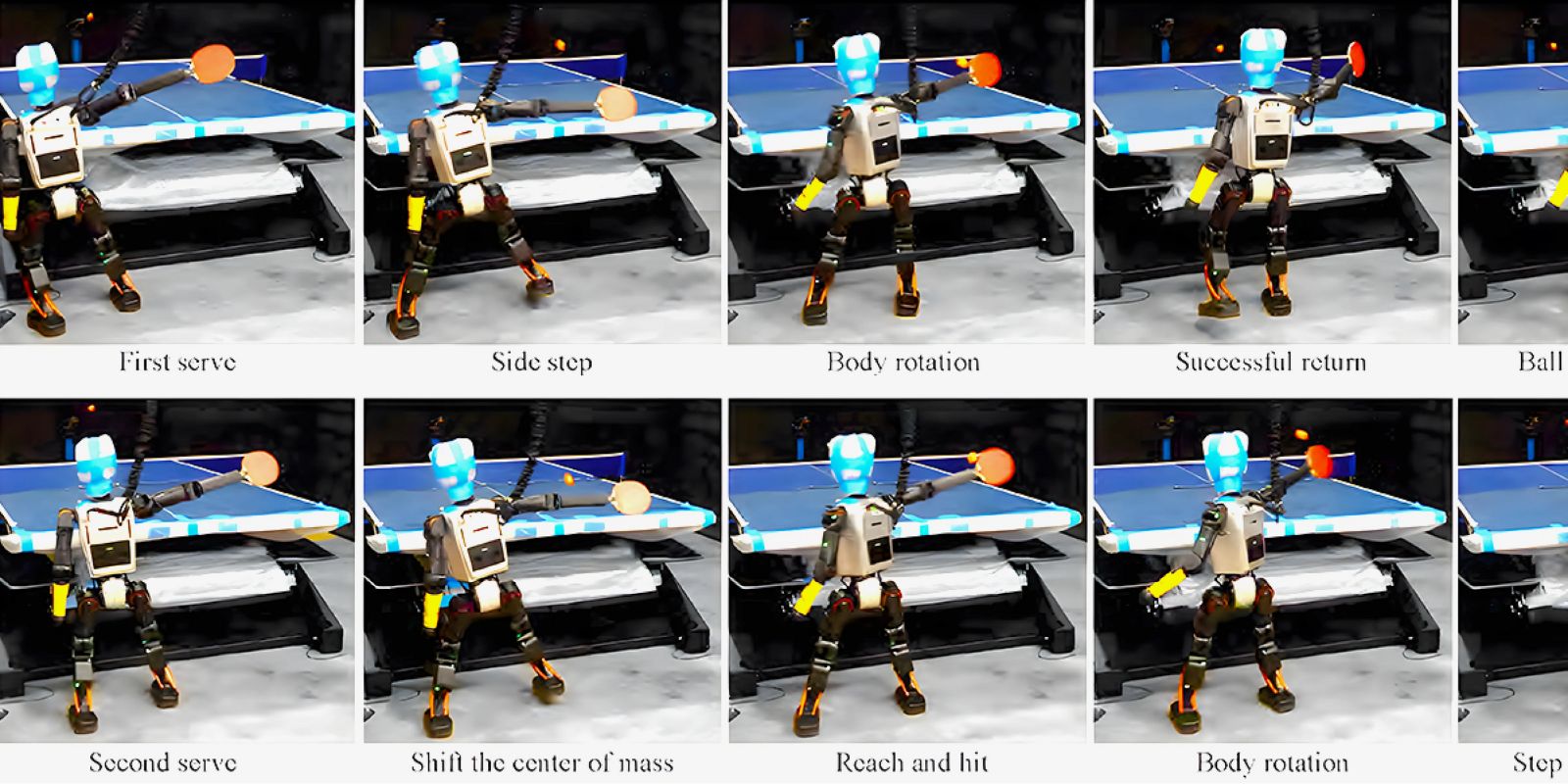
Au-delà des efforts, le T1 répond aux exigences d’agilité. Une étude de référence sur le tennis de table (publication arXiv) illustre ses réflexes et sa coordination corps entier. Le robot intercepte des balles rapides grâce à une perception en temps réel et à une planification de mouvement cohérente : jeu de jambes, déplacements latéraux et avant-arrière, synchronisation bras-tronc. Les politiques entraînées en simulation sont déployées zéro-réglage (zero-shot) sur le robot réel avec des résultats robustes.
Pourquoi c’est utile pour une une université ou un labo ?
Ces métriques confirment la pertinence du T1 pour la perception-action haute fréquence, le RL pour tâches agiles et les études de biomécanique du mouvement. Les équipes peuvent étudier la réactivité, la prédiction de trajectoires et la coordination multi-segments, en gardant une base matérielle stable.
À retenir : outils dédiés, transfert sim-to-real fluide, entraînements rapides : moins de frictions, plus d’itérations.
La valeur ajoutée du T1 se trouve aussi dans son écosystème logiciel. L’objectif : limiter l’ingénierie “glue” et accélérer la boucle hypothèse → expérimentation → analyse.
Workflow recommandé (pratique labo)
1. Concevoir et entraîner en simulation (données synthétiques, variations de domaines, bruit capteur).
2. Valider en hardware-in-the-loop (HIL) sur T1, en instrumentant les métriques d’effort et de stabilité.
3. Déployer et itérer en réel, avec enregistrements, relectures et ajustements ciblés (politiques et gains).
Effet sur les cycles de recherche
Ce pipeline raccourcit le délai entre une idée et une validation sur le robot. Les doctorants gagnent en cadence expérimentale. Les encadrants bénéficient de protocoles reproductibles et de métriques homogènes.
À retenir : une plateforme stable réduit la variance expérimentale et améliore la comparabilité inter-équipes.
La performance scientifique passe aussi par des bases d’ingénierie fiables. Le T1 propose une architecture cohérente (capteurs, actionneurs, synchronisation temporelle) et un empilement logiciel lisible, ce qui facilite :
Cette stabilité est un levier majeur pour des publications solides et des réplications hors du laboratoire d’origine.
À retenir : la plateforme couvre un spectre large, de la loco-manipulation à la perception rapide.
À retenir : le Booster T1 n’est pas seulement un humanoïde performant ; c’est une plateforme de recherche qui permet d’obtenir des résultats plus vite et plus proprement.
En combinant matériel éprouvé, contrôle d’effort pour la loco-manipulation, agilité pour la perception-action, et un écosystème logiciel tourné vers le transfert sim-to-real, le T1 apporte un cadre robuste aux équipes académiques. Les travaux sur la généralisabilité (transfert des politiques vers d’autres humanoïdes) renforcent sa pertinence comme base de comparaison et comme outil de production de résultats. Pour des laboratoires qui veulent accélérer sur le contrôle, le RL, la planification de contacts et l’interaction physique, le Booster T1 constitue un choix structurant : il réduit la charge d’intégration, améliore la reproductibilité et accélère le passage du concept au robot réel.

Marine Senecat
Content Manager chez Génération Robots