-
 Visit our shop
Visit our shop
-
Italiano
In sintesi: Booster T1 fornisce una base hardware e software pronta all’uso, per dedicare più tempo agli algoritmi e alla sperimentazione.
La robotica umanoide è impegnativa: stabilizzare la meccanica, l’equilibrio, la percezione e l’intera pila software richiede mesi di lavoro. Questo lavoro è necessario, ma spesso allontana i gruppi di ricerca dalle loro domande scientifiche centrali. Il Booster T1 propone un’alternativa pragmatica: una piattaforma umanoide robusta, già integrata, e un ecosistema software pensato per il trasferimento simulazione–reale (sim-to-real). In questo modo ricercatori e studenti possono concentrarsi su controllo, percezione e apprendimento, invece che sull’infrastruttura.
In sintesi: T1 combina locomozione e manipolazione, con un controllo di forza preciso e tollerante alle perturbazioni.
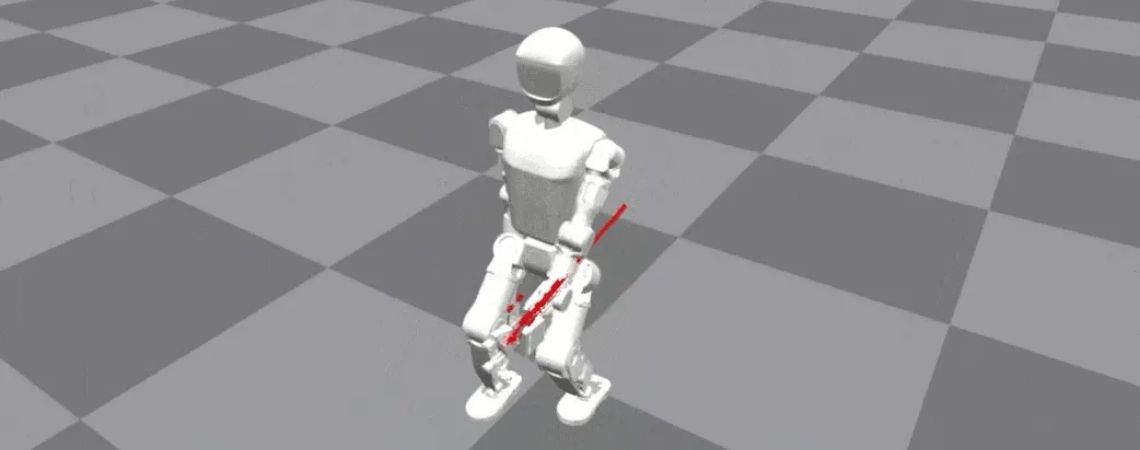
Booster T1 è stato validato su compiti di loco-manipolazione (spostarsi interagendo fisicamente con l’ambiente). Lavori svolti con FALCON (framework di reinforcement learning, RL) alla Carnegie Mellon mostrano un’esecuzione stabile in scenari reali. Il robot apre porte, traina carrelli, trasporta oggetti e adatta la postura a forze sconosciute. Le politiche di controllo testate su T1 sono state trasferite anche ad altri umanoidi (ad es. Unitree G1), a supporto della generalizzabilità dei metodi.
Perché è utile per un’università o un laboratorio?
Queste condizioni coprono casi ricorrenti in ambienti semi-strutturati: accesso a locali, spostamento di attrezzature, manipolazione di porte e serramenti, assistenza logistica leggera. T1 fornisce una base ripetibile e misurabile per testare strategie di controllo di forza, pianificazione dei contatti e collaborazione fisica uomo–robot.
In sintesi: T1 gestisce compiti rapidi e coordinati con una loop percezione–azione reattivo.
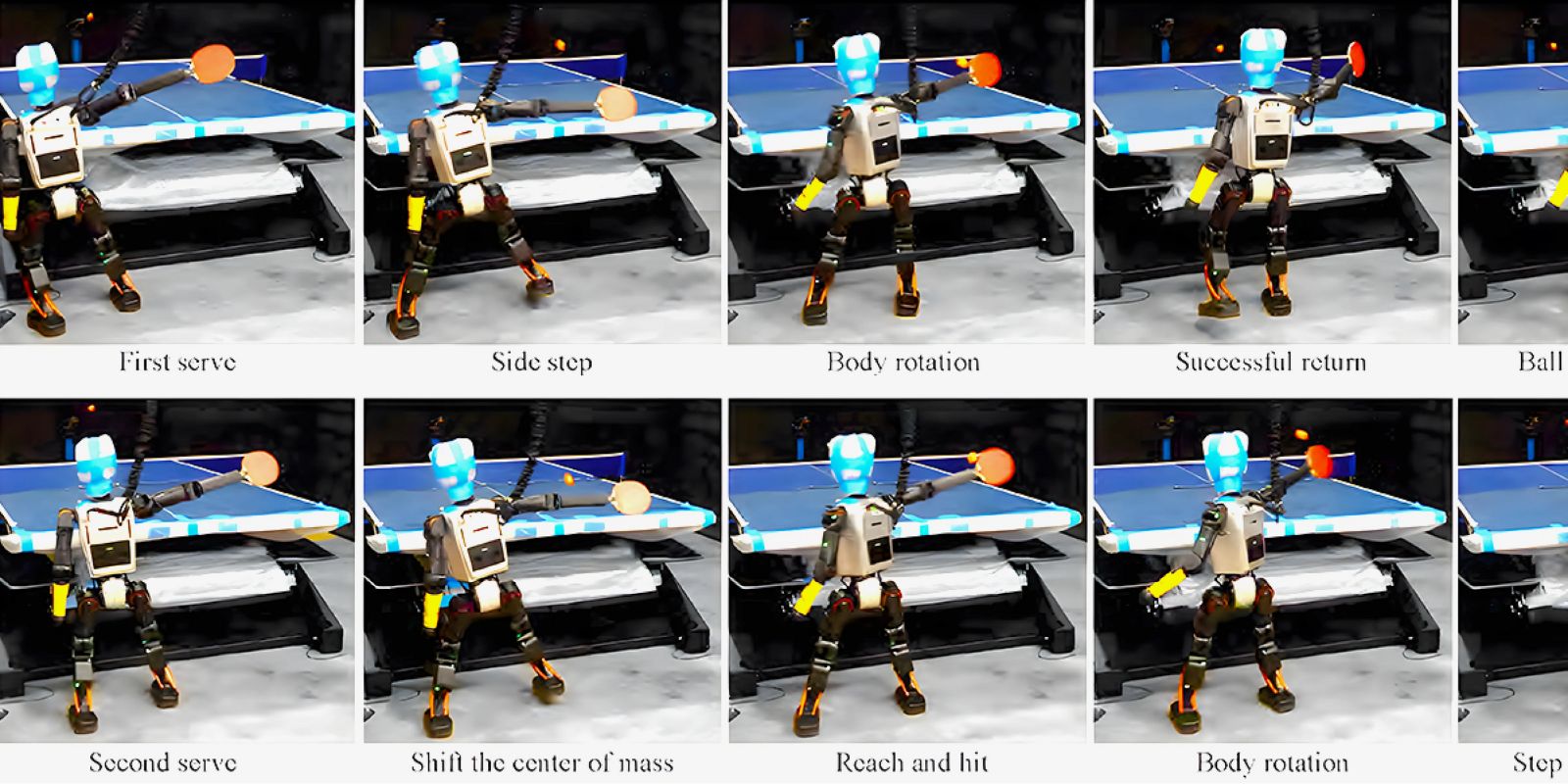
Oltre alle capacità di forza, T1 risponde alle esigenze di agilità. Uno studio di riferimento sul tennis da tavolo (pubblicazione su arXiv) illustra i suoi riflessi e la coordinazione dell’intero corpo. Il robot intercetta palline veloci grazie a una percezione in tempo reale e a una pianificazione del movimento coerente: gioco di gambe, spostamenti laterali e avanti–indietro, sincronizzazione braccio–torso. Le politiche addestrate in simulazione vengono distribuite zero-shot sul robot reale con risultati robusti.
Perché è utile per un’università o un laboratorio?
Queste metriche confermano la pertinenza di T1 per la percezione–azione ad alta frequenza, il RL per compiti agili e gli studi di biomeccanica del movimento. I gruppi possono studiare reattività, predizione di traiettorie e coordinazione multi-segmento, mantenendo una base hardware stabile.
In sintesi: strumenti dedicati, trasferimento sim-to-real fluido e training rapidi: meno attriti, più iterazioni.
Il valore aggiunto di T1 risiede anche nel suo ecosistema software. L’obiettivo è ridurre al minimo l’ingegneria “collante” e accelerare il ciclo ipotesi → esperimento → analisi.
Workflow consigliato (pratica di laboratorio)
1. Progettare e addestrare in simulazione (dati sintetici, domain randomization, rumore di sensore).
2. Validare in hardware-in-the-loop (HIL) su T1, strumentando le metriche di sforzo e stabilità.
3. Distribuire e iterare sul robot reale, con registrazioni, replay e aggiustamenti mirati (politiche e guadagni).
Impatto sui cicli di ricerca
Questa pipeline riduce il tempo tra l’idea e la validazione sul robot. I dottorandi guadagnano in frequenza sperimentale. I supervisori beneficiano di protocolli riproducibili e metriche omogenee.
In sintesi: una piattaforma stabile riduce la varianza sperimentale e migliora la confrontabilità tra gruppi.
Le prestazioni scientifiche dipendono anche da basi ingegneristiche affidabili. T1 offre un’architettura coerente (sensori, attuatori, sincronizzazione temporale) e una pila software leggibile, che facilita:
Questa stabilità è una leva importante per pubblicazioni solide e repliche al di fuori del laboratorio di origine.
In sintesi: la piattaforma copre un ampio spettro, dalla loco-manipolazione alla percezione rapida.
In sintesi: Booster T1 non è solo un umanoide ad alte prestazioni; è una piattaforma di ricerca che permette di ottenere risultati più velocemente e in modo più pulito.
Combinando hardware collaudato, controllo di forza per la loco-manipolazione, agilità per compiti di percezione–azione e un ecosistema software orientato al trasferimento sim-to-real, T1 offre un quadro robusto per i gruppi accademici. I lavori sulla generalizzabilità (trasferimento di politiche ad altri umanoidi) ne rafforzano il ruolo come base di confronto e strumento di produzione di risultati. Per i laboratori che vogliono accelerare su controllo, RL, pianificazione dei contatti e interazione fisica, Booster T1 rappresenta una scelta strutturante: riduce il carico di integrazione, migliora la riproducibilità e accelera il passaggio dal concetto al robot reale.

Marine Senecat
Content Manager presso Generation Robots