
Beta-test des Dynamixel XM-430
De nouveaux moteurs Dynamixel ont été développés par Robotis : les XM-430-210R et XM-430-350R. Ces derniers sont en phase de Beta-testing, et semblent prometteurs ! Nous avons eu l’occasion de les tester, nous vous livrons ici nos premières impressions. Les servomoteur XM-430 peuvent être considérés comme la nouvelle génération des servomoteurs MX-28.
Comme son prédécesseur, les XM-430 sont simples à utiliser, performants, précis et proposent de nombreuses fonctionnalités, sans compter les nouveautés qui offrent encore plus de fonctionnalités.
L’aspect mécanique
Les servomoteurs XM-430 (à droite), avec leur coque en aluminium et leur forme parallélépipédique, ont un aspect plus lisse, et sont légèrement plus petits que les MX-28 (à gauche).

Tout d’abord, au niveau du montage, l’étape est facilitée par les trous taraudés directement intégrés dans la coque, ce qui supprime les écrous. De plus, les câbles sont connectés au moteur dans un renfoncement, puis bloqués par un cache, ce qui évite les faux contacts au niveau du branchement, comme on peut le voir sur l’image ci-dessous.
Cela n’a l’air de rien mais pour ceux qui ont l’habitude d’utiliser les servomoteurs Dynamixel, il s’agit d’une amélioration très appréciable et bien sentie de la part de Robotis.

Si l’on devait parler d’un inconvénient des moteurs XM-430, ce serait celui-ci : du fait du positionnement des trous taraudés comparés aux MX-28, il faudrait réadapter les structures des robots afin de remplacer les anciennes versions par les nouvelles.
Nous avons remarqué en effet que les trous n’étant pas tout à fait compatibles avec les pièces de structure Bioloid (les pièces plastiques) mais en revanche, elles sont toujours adaptées aux pièces de structure en métal prévues pour les Dynamixel.
Ce petit inconvénient reste peu significatif comparé aux nouvelles fonctionnalités que proposent les Dynamixel MX430 et que nous allons développer dans la suite de cet article.
Comparaison avec les Dynamixel MX
L’alimentation
L’alimentation est la même que pour les versions MX, soit en 12V. Il est donc possible d’utiliser le même matériel d’alimentation, c’est-à-dire le chargeur SMPS ainsi que le SMPS. Concernant la consommation, les XM-430 consomment près de 2 fois moins que les Dynamixel MX (40mA au lieu de 100mA) !
C’est énorme et extrêmement important quand on sait que l’on cherche avant tout de la performance et de l’autonomie en robotique. On peut également rajouter que ces moteurs semblent moins chauffer que la série MX.
Caractéristiques générales
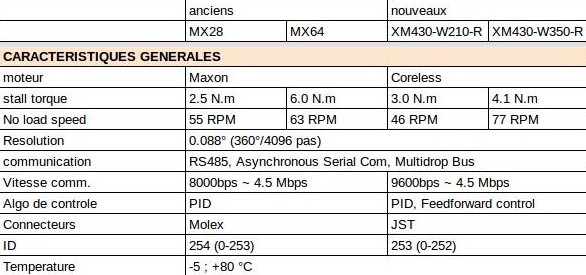
Le tableau ci-dessus compare les caractéristiques générales entre la nouvelle génération de moteurs XM-430 et l’ancienne génération MX-28. On peut notamment voir que le couple proposé par les XM-430 est supérieur à celui du MX-28. On peut également noter que la vitesse maximale est augmentée pour la version XM-430-W350-R.
On peut donc dire que, globalement, avec sensiblement les mêmes caractéristiques, la nouvelle génération de moteurs possède plus de puissance que l’ancienne.
Une question pourrait ensuite vous venir à l’esprit : quel est le mode de communication des moteurs ? les protocoles 1.0 et 2.0 sont tous les deux compatibles avec les Dynamixel XM-430. Autrement dit, ils peuvent être montés sur un robot aux côtés d’autres versions de servomoteurs Dynamixel. Pour rappel, la compatibilité dépend du protocole utilisé :
- Protocole 1.0 : séries AX, DX, RX, MX, EX.
- Protocole 2.0 : séries XL-320, Dynamixel-PRO.
De manière générale, le protocole 2.0 est grandement amélioré, et exploite 100% des capacités des XM-430, à l’inverse du protocole 1.0 qui empêche notamment d’utiliser certaines adresses des nouveaux moteurs.
Dans tous les cas, quel que soit le protocole utilisé, la programmation du moteur reste assez simple. En conclusion, même si les deux protocoles sont compatibles avec le XM-430, il est recommandé de se porter vers le protocole 2.0. Tous les nouveaux servomoteurs Dynamixel tendrons vers ce nouveau protocole.
Les nouvelles fonctionnalités
Plus de retours d’informations
De même que pour la série MX, les moteurs de la série XM-430 renvoient les mêmes informations comme la position, la tension d’entrée ou encore la température. Mais de nouvelles informations sont désormais disponibles :
- Le temps : permet de connaître l’instant exact du moteur (lors d’une mesure par exemple).
- Moving status : permet de savoir si le moteur est en mouvement ou non.
- PWM : permet de connaître le pourcentage de PWM (Pulse Width Modulation) utilisé. A noter que le PWM fait son apparition sur les servomoteurs Dynamixel !
- Trajectoire : permet de connaître le type de trajectoire sélectionné pour les mouvements. Là encore, une nouveauté, on peut configurer une trajectoire entre deux positions !
Les deux premiers peuvent, en fonction de votre utilisation, se révéler très utile pour mieux connaître l’état de votre moteur à un instant précis, et par exemple permettre une meilleure coordination entre vos moteurs et les autres fonctionnalités de votre robot.
De nouveaux modes de contrôle

A l’instar des moteurs de la série MX, les moteurs XM-430 possèdent un contrôle en position ainsi qu’un contrôle en vitesse. Mais d’autres modes de contrôle sont possibles sur les nouvelles générations :
- Contrôle en PWM : permet au final de contrôler la tension moyenne d’alimentation du moteur, ce qui module le couple et la vitesse de sortie. Ce mode est pratique pour un robot à roues. Le PWM est couramment utilisé sur les serviteurs classiques du monde du R/C et donc de nombreuses cartes de contrôle en sont dotés nativement. Le PWM fait donc son apparition au sein de la gamme Dynamixel avec la série XM.
- Contrôle en couple : passe en réalité par le courant. Le moteur exerce en continu le couple désiré, et se révèle pratique pour une pince ou une main. La encore, une, pour ne pas dire La fonctionnalité majeure attendue par les roboticiens.
- Contrôle en position basé courant : combine le contrôle en position et le contrôle en couple. Ce mode permet donc d’aller dans une position voulue avec un certain couple. Ce mode peut s’avérer utile dans un robot articulé. On sent déjà que de nombreux projets utilisant la compliance vont voir le jour grâce à ces nouveaux servomoteurs Dynamixel.
Ces nouveaux modes opératoires offrent plus de possibilités aux moteurs, et offrent donc plus de fonctionnalités aux robots.
Le contrôle de la trajectoire : l’ajout des profils
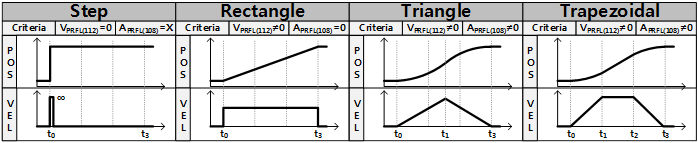
Une des améliorations majeures (avec le contrôle en couple) semble être l’ajout des profils en accélération et en vitesse afin de définir une trajectoire entre deux positions. En jouant sur ces deux paramètres, il est possible de donner une allure à la trajectoire du mouvement, ce qui offre donc un contrôle sur le mouvement.
4 types de trajectoire sont possibles, comme on peut le voir sur l’image ci-dessous. Ce contrôle reste certes limité à 4 trajectoires mais il offre déjà une possibilité de choisir un type de mouvement.
A contrario, l’ancienne génération de moteurs Dynamixel MX-28 permettait seulement de configurer la vitesse maximale atteignable.
En fonction de l’utilisation, le choix du profil de trajectoire peut donc se révéler primordial dans un robot.
Conclusion sur la Beta-test des Dynamixel XM-430
La nouvelle génération de Dynamixel semble plus performante, et présente surtout de nouvelles fonctionnalités. Ces dernières, permettent potentiellement d’améliorer les robots, quel que soit le type du robot : articulé, robot à roues, pince…
On peut également remarquer que ces moteurs ont tout l’air d’avoir été développé en tenant compte de la fiabilité ; les moteurs semblent moins chauffer que pour la série MX, et les faux-contacts ne devraient plus exister au niveau des connecteurs du moteur.
On peut finalement ajouter que l’ergonomie a été améliorée au montage grâce au nouveau design de ces moteurs Dynamixel XM-430.
Du point de vue négatif, il n’y a pas grand-chose à dire. Le premier point concerne l’adaptation mécanique sur les robots existants pour intégrer ces moteurs, qui reste un problème mineur vu que ces derniers ne sont pas plus volumineux. L’autre point concerne la mesure d’intensité qui ne semble pas être encore tout à fait opérationnelle.
Nous avons en effet remarqué pas mal de bruit dans les mesures que nous avons effectuées. Mais ce dernier point ne dévalorise pas les XM-430 comparés au MX-28, qui lui ne possède pas de système de mesure de courant.
Un exemple d’application : Poppy
On peut imaginer l’intégration de cette nouvelle génération de Dynamixel dans Poppy Humanoid, ce qui pourrait sensiblement améliorer cette plateforme open-source : consommation réduite, nouvelles fonctionnalités…
En effet, la coordination entre les différents mouvements peut être améliorée, ainsi qu’entre les mouvements et d’autres fonctionnalités comme les yeux sur l’écran de Poppy. De plus, le nouveau contrôle des mouvements pourrait rendre le robot bien plus réel.
Comme pour Poppy, les robots d’aujourd’hui, notamment ceux basés sur les Dynamixel de la série MX, auront la possibilité d’évoluer et ainsi obtenir des fonctionnalités améliorées, voire de nouvelles compétences.