Im Bereich Viehzucht stellt das Ausmisten eine zeitaufwendige und ermüdende Aufgabe dar, die jedoch (mehrmals täglich) unbedingt ausgeführt werden muss.
Dies kann auf verschiedene Weisen erfolgen: Wasserreinigung, automatische Unterflurschieber (Kette, Kabel oder Seil), Traktor mit Rakel.
Diese Methoden, die in der Viehzucht sehr häufig zum Einsatz kommen, sind mit gewissen Einschränkungen verbunden:
- Beanspruchung der Arbeitskräfte (Fahren des Traktors, Herauslassen der Tiere)
- Überwachung und Instandhaltung (Anschließen von Ketten, Kabeln bzw. Seilen)
- Änderungen an der Gebäudearchitektur (Gefälle von 1,5 % bis 2 % für Wasserreinigung, Bodengestaltung für Seil-, Kabel- oder Kettendurchgang)
Im vorliegenden Fall ergibt die Inbetriebnahme eines autonomen Roboters, der das Ausmisten übernimmt, durchaus Sinn und stellt für den Landwirt einen echten Vorteil dar:
- es ist kein menschliches Eingreifen erforderlich.
- Es ist nicht erforderlich, die aktuelle Gebäudestruktur zu ändern oder neue Anlagen zu errichten
- Der Landwirt kann die Reinigungshäufigkeit einstellen (d.h. die am stärksten verschmutzten Bereiche werden häufiger gereinigt)
- Einfachere Verwertung von Gülle (Methanisierung)
CRD : SPEZIALISTEN FÜR AUTOMATISIERTE VIEHZUCHTLÖSUNGEN
Die Firma CRD (Concept Rolland Développement) entwickelt automatische Lösungen zur Abwasserreinigung, -verwaltung und -verwertung und Fütterung im Bereich Viehzucht.
Mit 20 Jahren Erfahrung hat CRD bereits mehrere Tausend Standorte in Frankreich und im Ausland ausgestattet.
Weltweite Standorte des Unternehmens CRD

Ferner verfügt die Firma über eine Forschungs- und Entwicklungsabteilung, die Systeme von morgen erforscht, testet und produziert.
Die Geräte der Marke CRD werden unter Einhaltung strikter Spezifikationen hergestellt. Die Dienstleister und Partner von CRD werden sorgfältig aufgrund der Zuverlässigkeit ihrer Produktion und ihres Services ausgewählt.
GÉNÉRATION ROBOTS: EXPERTEN FÜR GLEICHZEITIGE LOKALISATION UND MAPPING FÜR AUTONOME ROBOTER
Im Laufe ihrer verschiedenen Projekte konnte sich die Firma Génération Robots umfangreiches Wissen im Bereich Mapping und Lokalisation aneignen – sowohl bei Haushaltsrobotern, die mit einfachen LIDAR 2D ausgestattet und für den Einsatz auf flachem und statischem Boden gedacht sind, als auch bei komplexeren Robotern, die mit dreidimensionalem Mapping arbeiten und in dynamischen Umgebungen im Freien zum Einsatz kommen.
Eines der Ziele der Firma CRD war es, eine ihrer Landmaschinen in einen mobilen Roboter zu verwandeln, der sich in einer schwierigen Umgebung selbstständig entwickeln könnte. Die Zusammenarbeit mit Génération Robots war der nächste logische Schritt. Die Ingenieure von Génération Robots haben den Roboter mit verschiedenen Sensoren ausgestattet und die erforderliche Mapping-, Lokalisations- und Navigations-Software entwickelt.
Dank der Verwendung verschiedener Lokalisationssysteme mit zusätzlichen Eigenschaften und von adaptierten Datenfusions-Strategien konnte ein erfolgreicher Einsatz des CRD-Roboters in einer schwierigen Umgebung gewährleistet werden: nur wenige Orientierungspunkte, zahlreiche Rinder, die das Sichtfeld des LiDAR versperrten, äußerst rutschiger Boden, zahlreiche Steigungen und u. U. bewegliche Teile der Umgebung.
DER ROBOTER ASPI‘CONCEPT: DIE LÖSUNG DER FIRMA CRD
Mit ihren 20 Jahren Erfahrung bei der Verwaltung und Verwertung landwirtschaftlicher Abfälle hat die Forschungs- und Entwicklungsabteilung der Firma CRD den Roboter Aspi’Concept entwickelt und gebaut. Dieser autonome Roboter dient zum Schaben und Absaugen, um eine optimale Reinigung des Bodens zu gewährleisten.

Technische Spezifikationen des autonomen mobilen Roboters Aspi’Concept:
- Ein mobiler Roboter aus Edelstahl mit einer leistungsstarken Vakuumpumpe (Ansaugen von dickflüssiger Gülle möglich)
- 2 Antriebsräder und 1 Skate-Rad vorne
- Eigengewicht: 500kg
- Lasersteuerung mit einem 360-Grad-Sichtfeld
- Großer Güllebehälter (350 L) mit schneller Entleerung
- Ausgestattet mit einem 1,50 m großen Gummi-Schaberblatt mit Rollen an den Enden (zur besseren Reinigung der Winkel)
- Betriebszeit: 12h
- Ladezeit: 12h
- Möglichkeit des Hinzufügens eines Wasserbehälters und von Bussen (2L/Min)
- Schaben auf einer ebenen Fläche oder einer Steigung (bis zu 8 %)
- Navigation auf festem Boden oder Gitterrost (beim letzteren wird Gülle aufgepumpt)
- Einsatz in mehreren Bauten (80 bis 100 Kühe)
- Die Vorgabe der Wege, der Betriebszeiten und der Einsatzhäufigkeit erfolgt über einen Tablet- oder Desktop-PC
Vorteile eines Aspi’Concept Roboters:
Der Roboter Aspi’Concept:
- Übernimmt einen Teil anstrengender Reinigungsarbeiten
- Reduziert den Bedarf an Arbeitskraft
- Spart Zeit
- Lässt sich tags- oder nachtsüber, im Innen- oder Außenbereich einsetzen
- Bietet mehr Bewegungsfreiheit für Tiere und Menschen
- Verbessert das Wohlbefinden der Tiere und die Hygiene in ihrer Umgebung
- Lässt sich einsetzen, ohne dass die Architektur der Bauten angepasst werden muss
- Harmonie zwischen dem Schabeprozess und dem Verhalten der Tiere
Dieser Roboter bietet sowohl Rentabilität, als auch Zeitersparnis bei der Arbeit
SCHWIERIGKEITEN BEI CRD UND UNTERSTÜTZUNG DURCH GÉNÉRATION ROBOTS
Die Schwierigkeiten, auf die dieser Roboter stößt und die seine Performance beeinträchtigen, sind umgebungsbedingt:
- Rutschiger Boden mit Löchern und Steigungen
- Hohe Kuhdichte um den Roboter herum, was sich auf sein Sichtfeld auswirkt
- Verschmutzung von Sensoren im Laufe der Zeit (Tierexkremente)
Diese Faktoren behindern das ordnungsgemäße Funktionieren des Roboters, hauptsächlich im Hinblick auf die autonome Navigation.
Damit keine Probleme auftreten, muss der Roboter folgende Fähigkeiten haben:
- Mapping des landwirtschaftlichen Betriebs
- Sich auf der Karte finden können
- Autonome Navigation auf den vom Benutzer vorgegebenen Wegen
- Erkennung von Kollisionen
- Erkennung des Verrutschens des Rads
- Meldung von Problemen per E-Mail und/oder SMS
- Eine Web-Benutzerschnittstelle
- Navigation im Innen- und Außenbereich
- Fortbewegung über Gehwege, um eine komplette Reinigung der Flure zu gewährleisten
- Umgehung von Hindernissen
- Kontrolle des Akkustands
DIE IMPLEMENTIERTE LÖSUNG
Im ursprünglichen Design des mobilen Roboters Aspi’Concept waren folgende Faktoren vorgesehen:
- 1 LiDAR (im unteren Teil des Roboters angebracht), mit dem der Roboter sich unabhängig über Gehwege fortbewegen kann
- 2 Encoder, um die Bewegungsrichtung und -geschwindigkeit der Motoren der Räder zu erfassen
Aufgetretene Probleme: autonome Navigation wird aufgrund der sehr schnellen Verschmutzung des unten angebrachten LiDAR erschwert. Darüber hinaus gibt es auf dieser Höhe keine zuverlässigen Orientierungspunkte, die zur automatischen Ortung verwendet werden könnten. Begrenzte Autonomie, da die Gehwege eine Einschränkung darstellen.
Um das Problem der Verschlechterung des Sehvermögens des Roboters (häufiges Spritzen auf den LiDAR), die seine autonome Navigation behindert, zu lösen, hat Génération Robots folgende Lösung gefunden:
Installieren eines zweiten LiDAR im oberen Teil des Roboters:
- hier ist er ausreichend vor Spritzern geschützt.
- Hier kann der Sensor die Orientierungspunkte der Umgebung besser wahrnehmen.
Um die autonome Navigation zu verbessern, hat sich unser Team der AMCL-Methode bedient und sie auf das Echtzeit-Mapping angewandt.
Die AMCL-Lokalisationsmethode in Kombination mit dem autonomen Hector SLAM Algorithmus ermöglichte ein präzises Echtzeit-Mapping des Betriebs durch die effiziente Nutzung dieser zwei sich ergänzenden Algorithmen. Ihre Informationen werden miteinander auf eine dynamische Weise in Abhängigkeit von ihrer Performance kombiniert.
Die AMCL-Methode hat Priorität, wenn die Umgebung nur schwer auszumachen ist oder nur weniger Orientierungspunkte bietet. Hector SLAM ermöglicht andererseits eine effiziente und schnelle Neupositionierung des Roboters, wenn genügend Orientierungspunkte erkennbar sind.
Es wurde eine Inertialeinheit (IMU) hinzugefügt, um dem Roboter dabei zu helfen, seine Umgebung (Steigungen, Rinnen) und seine Bewegung (Drehen, Rutschen usw.) wahrzunehmen. Ein absolut unverzichtbarer Sensor für einen mobilen Roboter, der sich unabhängig fortbewegt, insbesondere in einer mobilen Umgebung (Kühe) und umgeben von Hindernissen, die sich auf die Geschwindigkeit des Roboters auswirken können (Rinnen, rutschige Schlammpfützen, Gitterroste, Steigungen).
SENSOREN ALS ERGÄNZUNG ZUR GRUNDAUSSTATTUNG
Die Ingenieure von Génération Robots haben einen zweiten LiDAR hinzugefügt und den ersten ersetzt. Sie haben sich für den RPLidar S1 des Herstellers SLAMTEC entschieden.
Vorteile des RPLidar S1 bei diesem Anwendungstyp:
- Lange Reichweite (40 m)
- Einsatz im Innen- und Außenbereich
- ROS-kompatibel
- Ausgezeichnetes Preis-Leistungs-Verhältnis

Bei der ausgewählten IMU handelt es sich um den UM7 Sensor von Redshift Labs, der von unseren Ingenieuren bereits im Rahmen anderer Projekte getestet wurde. Dieser Sensor ist zur Gewährleistung einer guten Navigation unbedingt erforderlich.
Vorteile der UM7 Inertialeinheit bei diesem Anwendungstyp:
- Einfache Installation
- ROS-kompatibel
- Ausgezeichnetes Preis-Leistungs-Verhältnis

Um die Position des Roboters, seine Routen und die Topographie seiner Umgebung in Echtzeit bestimmen zu können, haben wir die von diesen Sensoren stammenden Daten kombiniert.
DIE MONTE-CARLO METHODE AUF SLAM ANGEWANDT
Die Mapping-Funktion wird bei jedem LiDAR in Echtzeit ausgeführt; daher stehen dem Roboter zum Auswählen des Wegs 2 Karten zur Verfügung. In einer Umgebung, die von permanenter Bewegung von Kühen geprägt ist, erhält der Roboter dadurch unschätzbare Hilfe.
Unser Team verbesserte den 2D Hector SLAM Lokalisationsalgorithmus durch die Anwendung der Monte-Carlo-Methode, einer algorithmischen Methode, die auf der Basis probabilistischer Techniken funktioniert. Diese Methode, die als AMCL bezeichnet wird, ermöglicht die Anwendung eines statistischen Ansatzes beim Mapping in Echtzeit.
DIE PARTIKELFILTER FÜR DIE AUTOMATISCHE LOKALISIERUNG DES ROBOTERS
Bei diesem im Bereich Viehzucht eingesetzten Roboter weist der Algorithmus jeder Karte und ihrer Fortbewegungslösung eine Wahrscheinlichkeitsverteilung zu Somit haben wir ein Punktesystem erstellt, basierend auf der für die zwei Karten (LiDAR 1 und LiDAR 2) optimierten Fortbewegungswahrscheinlichkeit.
Im unten stehenden Abschnitt wird die Funktionsweise dieser Methode ausführlicher erläutert:
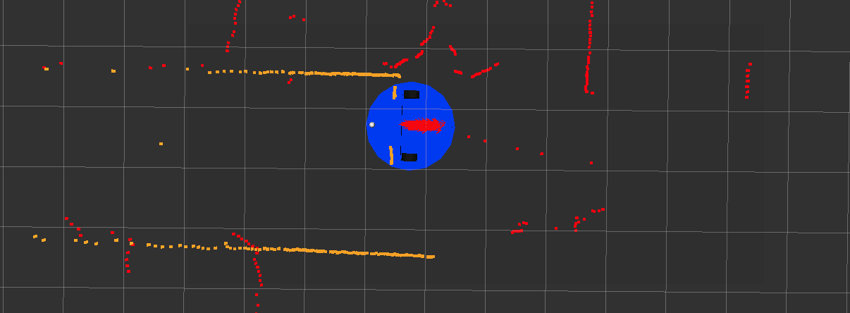
Die automatische Lokalisierung des Roboters funktioniert auf der Basis eines Partikelfilters, wobei jedes Partikel eine potenzielle Position des Roboters darstellt. Der Roboter analysiert seine Umgebung mithilfe dieser Sensoren und weist jedem Partikel eine Wahrscheinlichkeitspunktzahl zu.
Je höher die Wahrscheinlichkeit, dass die Position des Roboters korrekt ist, desto höher die Punktzahl.
Die geringsten Punktzahlen werden daraufhin eliminiert, und der Algorithmus errechnet den Durchschnittswert der besten Punktzahlen, um die aktuelle Position des Roboters zu bestimmen.
Die mithilfe dieser Methode erzielten Ergebnisse sind extrem genau, selbst wenn der Roboter in Bewegung ist.
Konvergenz der Partikel des AMCL Knotens zur Bestimmung der Position des Roboters
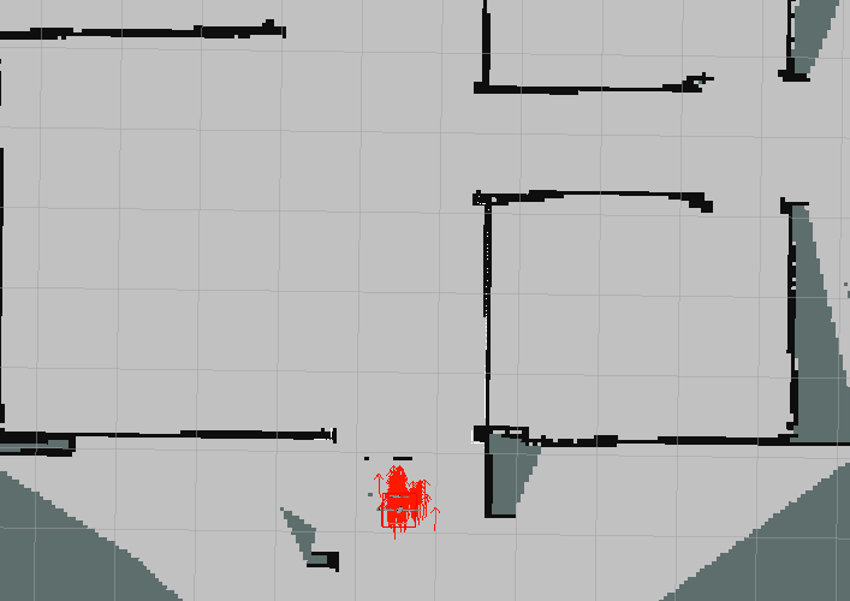
Konvergenz der Partikel des AMCL Knotens zur Bestimmung der Position des Roboters
DIE PROGRAMMIER- UND KONFIGURATIONS-SCHALTFLÄCHE
Unser Team hat eine QT-Schnittstelle entwickelt, mit deren Hilfe der Benutzer den mobilen Roboter Aspi’Concept programmieren und konfigurieren kann:
- Über einen Web-Browser abrufbare Schnittstelle
- Erstellung von Routen
- Erstellung von Karten
- Planung von Reinigungsarbeiten
- Speicherung von Konfigurationen und Modellen
- Konfiguration des Roboters
- Erhalt von Fehlermeldungen, Benachrichtigungen, Warnungen
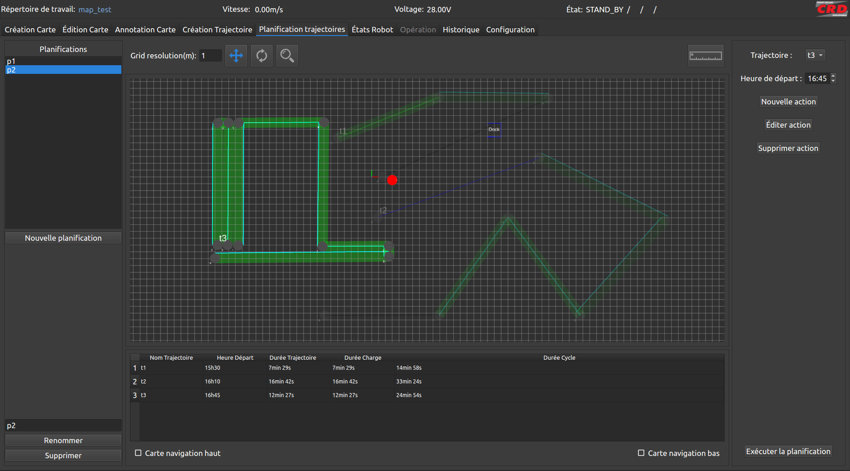
Steuerungsschnittstelle des autonomen Roboters Aspi’Concept
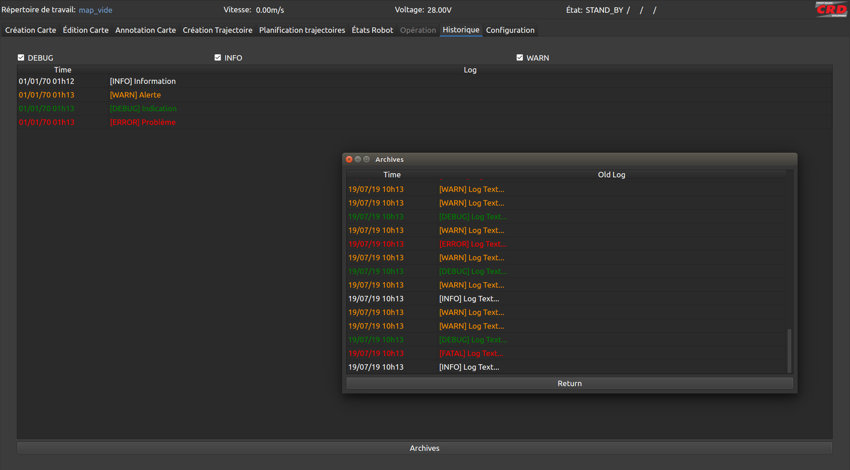
Steuerungsschnittstelle des autonomen Roboters Aspi’Concept
ERGEBNISSE DES PROJEKTS SLAM FÜR MOBILE ROBOTER, DIE IN DER LANDWIRTSCHAFT ZUM EINSATZ KOMMEN
Die von Génération Robots entwickelte Software beschleunigte den Einsatz des Roboters durch CRD im Bereich Landwirtschaft. Derzeit sind bereits 20 Einheiten im Einsatz.
Zwischen Génération Robots und CRF erfolgt ein Wissensaustausch (Nutzung des Roboters, Verstehen der Software, Wartung usw.).
Bis heute wurden 200 Aspi’Concept-Roboter in Frankreich eingesetzt (August 2024).