Mit diesem Tutorial lernen Sie, wie Sie Ihre Robotis Dynamixel-Servomotoren dank einer Bluetooth-Verbindung einfach von Ihrem Computer aus steuern können. Mit dieser Vorgehensweise können Sie Ihre Tests einfach durchführen und ersparen sich gleichzeitig nervige Kabelverbindungen.
Notwendige Hardware
- 12V/5A Stromversorgung.
- BBT-410 Dongle-Modul.
- BT-410 Slave-Modul.
- Dynamixel-Servomotor (hier ein MX-28).
- OpenCM9.04.
- OpenCM485
- 3 (oder 4) poliges Kabel für Dynamixel.
- Mikro-USB-Kabel.
Notwendige Software
- Arduino.IDE.
Installation
Verbindungen:
- Verbinden Sie das OpenCM9.04 -Board mit dem OpenCM485 EXP-Board.

- Schließen Sie den Servomotor über das 3 (oder 4) Pin Dynamixel-Kabel an den OpenCM485 EXP an.
- Schließen Sie den BT-410-Slave an das OpenCM9.04-Board am UART-Port an.
- Verbinden Sie das OpenCM9.04-Board über das Mikro-USB-Kabel mit dem PC.
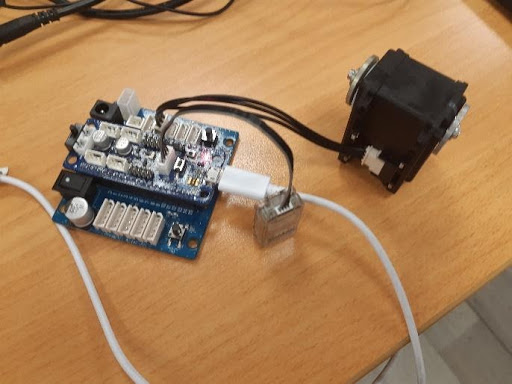
Das OpenCM9.04-Board ist eingeschaltet und das BT-410-Modul blinkt blau.
Software:
- Laden Sie die Arduino.IDE -Software herunter.
- Starten Sie Arduino.IDE, gehen Sie zu Datei , dann Einstellungen .
- Geben Sie in den Einstellungen den folgenden Link in das Feld Additional Board Manager URLs ein: https://raw.githubusercontent.com/ROBOTIS-GIT/OpenCM9.04/master/arduino/opencm_release/package_opencm9.04_index.json
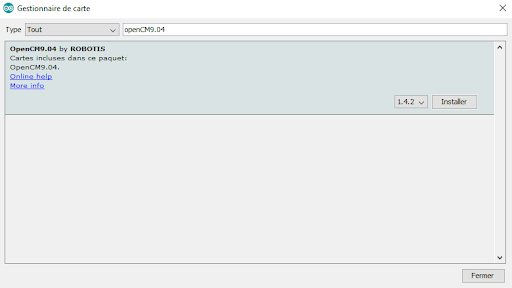
- Gehen Sie auf Tools , dann Board Type und klicken Sie auf Board Manager .
- Suchen Sie nach dem Abschnitt OpenCM9.04 by ROBOTIS und klicken Sie auf den Installieren-Button .
- Schließen Sie die Arduino.IDE-Software und starten Sie sie erneut.
- Gehen Sie auf Tools und dann auf Board Type . Wählen Sie aus der Liste OpenCM9.04-Board aus.
- Gehen Sie auf Tools und dann auf Port . Wählen Sie den Port aus, der dem OpenCM9.04-Board entspricht.
Vorgang
Setup
- Starten Sie Arduino.IDE.
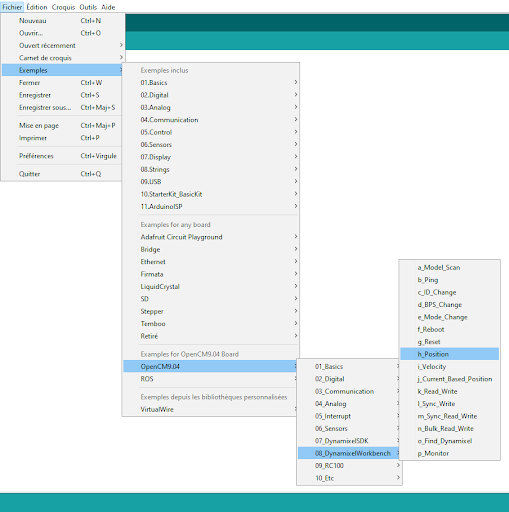
- Gehen Sie zu Datei ? Beispiele ? OpenCM9.04 ? 08_DynamixelWorkbench und klicken Sie dann auf h_Position .
- Es öffnet sich ein neues Fenster mit dem Setup-Programm, das zur Steuerung des Servomotors notwendig ist.
Programm
- Schreiben Sie das gewünschte Programm.
- Laden Sie das Programm auf das OpenCM9.04 herunter.
- Entfernen Sie das OpenCM9.04-Board vom PC
- Versorgen Sie das OpenCM485 EXP-Board mit dem 12V/5A-Netzteil und drücken Sie den Schalter.
- Schließen Sie das BT-410 Dongle -Modul an den PC an. Bringen Sie die beiden Module näher zusammen, um sie zu koppeln. Die Module sind synchronisiert, wenn das Blinken aufhört.
- Gehen Sie in der Arduino.IDE-Software auf Tools , Port und wählen Sie den Port aus, der dem BT-410 Dongle-Modul entspricht.
- Öffnen Sie den seriellen Monitor, um mit dem OpenCM9.04-Board zu kommunizieren. Der Monitor muss auf 57600 Baud eingestellt sein.
Beispiele für Programme
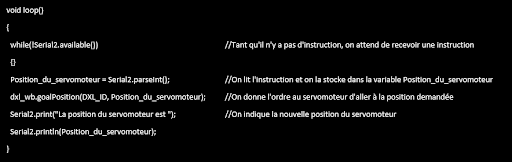
Servomotor steuern
Ermöglicht die Auswahl der Position des Servomotors zwischen Position 0 und Position 4095.
- Geben Sie die Codezeile « int Position_du_servomoteur ; » unterhalb der Codezeile « DynamixelWorkbench dxl_wb; » ein.
- Geben Sie in der Funktion void setup() die Codezeile « Serial2.begin(57600); » ein.
- Geben Sie in der Funktion void loop() die folgenden Codezeilen ein:
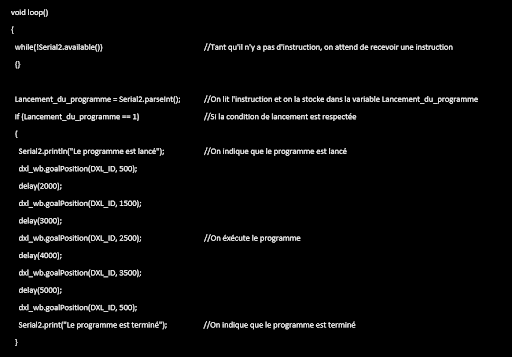
Reihenfolge von Positionen
Erlaubt es, eine Reihe vorgegebener Positionen zu starten, wenn ein bestimmter Befehl gegeben wird (hier ist der Befehl “1”).
- Geben Sie die Codezeile « int Lancement_du_programme ; » unterhalb der Codezeile « DynamixelWorkbench dxl_wb; » ein.
- Geben Sie in der Funktion void setup() die Codezeile « Serial2.begin(57600); » ein.
- Geben Sie in der Funktion void loop() die folgenden Codezeilen ein: