Dynamixel Controllers
Controller (oder Controllerboards) ermöglichen die Steuerung der Dynamixel Servomotoren, die Ihre Kreationen zum Leben erwecken. Controller sind das 'Hirn' Ihrer Roboter, die mithilfe von Controllern programmiert werden.












Die 4P JST Karte ist eine Erweiterungskarte, mit der zusätzliche Funktionen zu Ihrem Roboter hinzugefügt werden können.


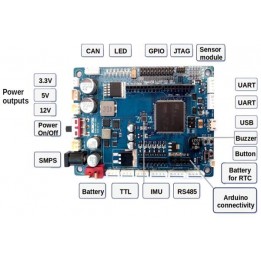
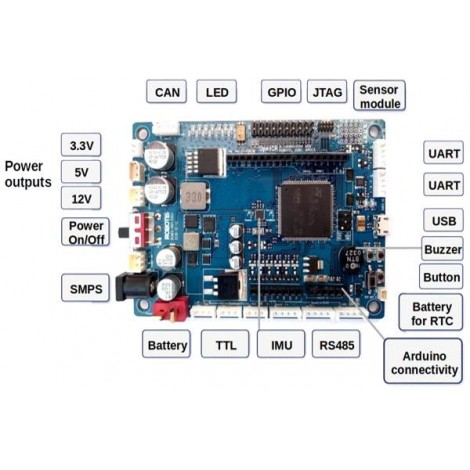
Dieser Controller für Dynamixel Servomotoren bietet zahlreiche Funktionen, die eine komplette Steuerung der Roboternavigation sicherstellen. Er umfasst ein vielfältiges Spektrum an Sensoren sowie genügend Anschlussschnittstellen zum Hinzufügen von Peripheriegeräten.

Dieses Open-Source Controllerboard ist ideal für Ihren Roboter Turtlebot 3: Ein Controller für ROS, ausgestattet mit einem Prozessor ARM Cortex-M7, der in der Lage ist, Ihre Servos Dynamixel und viele andere Module zu steuern!


Die Erweiterungskarte OpenCM 485 wird an Ihrem Controller OpenCM9.04 angeschlossen und stellt zusätzliche Dynamixel Schnittstellen bereit.

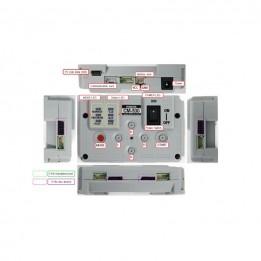
Der Controller CM-150 wird bei der Programmierung von Roboterbausätzen wie dem Robotis Dream Level 2 eingesetzt. Er erlaubt den Anschluss zahlreicher Komponenten: Sensoren, Untersetzungen, LED-Module usw.

Als Ergänzung zum Open Source-Controller CM9.04-A für Dynamixel Servomotoren wird dieses Set von Anschlusszubehörteilen angeboten.

Paket mit 10 Sicherungen für die Controller CM-5 oder CM-2+


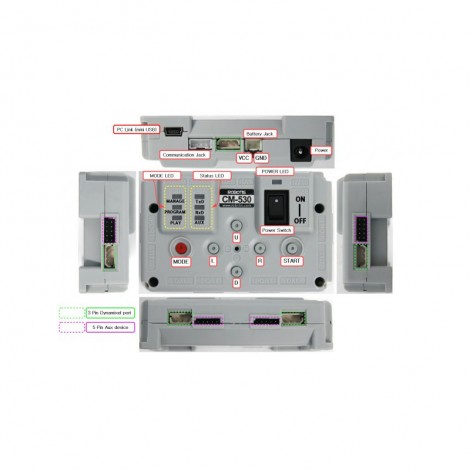
Der Controller CM-530 steuert Dynamixel Servomotoren der Baureihen MX und AX. Er enthält einen Mikrocontroller ARM Cortex STM32F103RE und wird über die Software RoboPlus per USB programmiert.