
A major software update for Baxter Research robot
Rethink Robotics, collaborative Baxter robot manufacturer has just announced in a quick succession new manufacturing software and SDK releases for Baxter. Baxter has been created in two versions: a manufacturing one dedicated to manufacturing industry running on a software platform that you can program simply by handling its arms and the arms buttons for the setup. The other version, Baxter Research is programmable from a PC connected to Baxter with the ROS SDK (Robot Operating System). These two Baxter versions are made of the same hardware.
ROS SDK 1.0 for Research and Education Baxter
An SDK upgrade from version 0.7 to version 1.0 clearly shows that the latter is a major release. The Research version has been extensively used by academic and corporate research labs since it became the ideal research platform for R&D research projects on collaborative robotics, but what changes bring this new ROS SDK release? The main enhancements are the following:
- Remote access to the CPU via SSH, allowing users to run code and applications locally. This new feature has been expected for a long time by the community since it improves robot performances significantly.
- Compatibility with standard ROS tools and libraries: Gazebo simulator, Rviz and obviously the MoveIt! Library. This complete compatibility comes handy for sharing code and best practices within the users’ community.

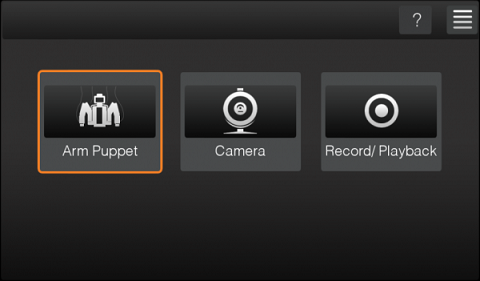
- Baxter Research Demo Mode let users easily carry out demonstrations. This mode let you introduce all new Baxter functionalities for demo purposes thanks to a control interface from its arm navigator inputs. Examples are already available in “Puppet mode” when gestures given to an arm are automatically repeated by the other arm; “Camera mode” where camera feedback is displayed by Baxter’s screen and finally a “Record/Playback mode” where you can record movements from Baxter’ arms simply by handling them manually and by asking Baxter to repeat these moves.
- Access to a graphical menu for launching Baxter’ calibration
- A new “Waypoints” recording program which records arm positions
- Some advanced configuration settings are also available for a better integration of Baxter in your university or corporate network.
- Finally major improvements in movements accuracy and planning have been carried out in this new release, making Baxter more efficient and reliable. SDK users will have more functionalities and options to their disposal in order to write more accurate and upgradeable code in line with their research needs.
Intera 2.1: The new manufacturing software version for Baxter Research robot
Intera is now the new name for the manufacturing software installed on Baxter. Intera is the cornerstone of Rethink Robotics offering since collaborative robotics has been achieved only through Intera: It allows the operator to interact intuitively with Baxter to teach it gestures to accomplish without any computer or robotics skills needed. It goes without saying that this kind of production software applied to robotics is a revolution in itself for industrial robotics, an industry where the collaborative aspect of human robot interaction has never been fully explored.
2.1 Intera software version offers new functionalities but also significant performance improvements. Indeed Baxter’s accuracy and speed performance enable it to complete the same task in half the time taken with the previous Intera version.
About functional enhancements, we can also mention the ability left to the operator to choose how quickly or how precisely Baxter completes a task.
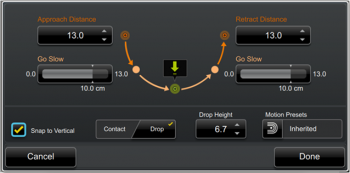
In addition a nudge feature allows the user to adjust manually pick and place operations thanks to a new interface menu. Finally a safety feature helps to authorise access to Baxter learning interface only to users holding a specific USB pendrive.
Baxter Research is available on Génération Robots’ site:
Baxter Research Robot Prototype