-€34,928.00

Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
Including €4.17 for ecotax (not impacted by the discount)
/!\ Used robot /!\
The Baxter robot has been created by the company Rethink Robotics, founded by Rodney Brooks, famous director of the Artificial intelligence laboratory of the MIT during 10 yers and co-founder of the company IRobot. The robot Baxter is emblematic of the new wave of collaborative robots or cobots.
Collaborative robotics is to think of robots so that they work together and in contact with humans, which is different from traditional industrial robots that automate a task on a production line but do not interact with humans while working.
A collaborative robot is then slower than traditional industrial robots and is "compliant", that's to say that its movements are elastic, not dangerous to humans and closer to what is found in nature
Rather than performing a single task continuously such as conventional industrial robot, a collaborative robot must be able to perform several small tasks in interaction with humans during the same day at different places in the warehouse. This kind of behavior is particularly suitable for small businesses that do not have sufficient volume to continuously automate a task but gain in productivity if they can automate many small tasks with low added value.
The robot Baxter proposed here is the research and education version. Compared to the "manufacturing" version, the only difference is the embeded software. Indeed, the research and education Baxter robot comes with a ROS-compatible SDK, while the manufacturing version comes with a production software created by Rethink Robotics.
The Baxter Research robot may advantageously be used to support numerous research and education programs such as human-robot interaction, collaborative robotics, planning, object recognition and object manipulation, computer science, perception, neurosciences and cognitive sciences. ..
The Baxter Research robot is the solution of choice to think the factory of the future and as such, is particularly suitable for the R&D departments of companies wishing investigate the area of collaborative robotics.
As a collaborative robot, Baxter is:
The technical specifications of the Baxter Research robot are as follows:
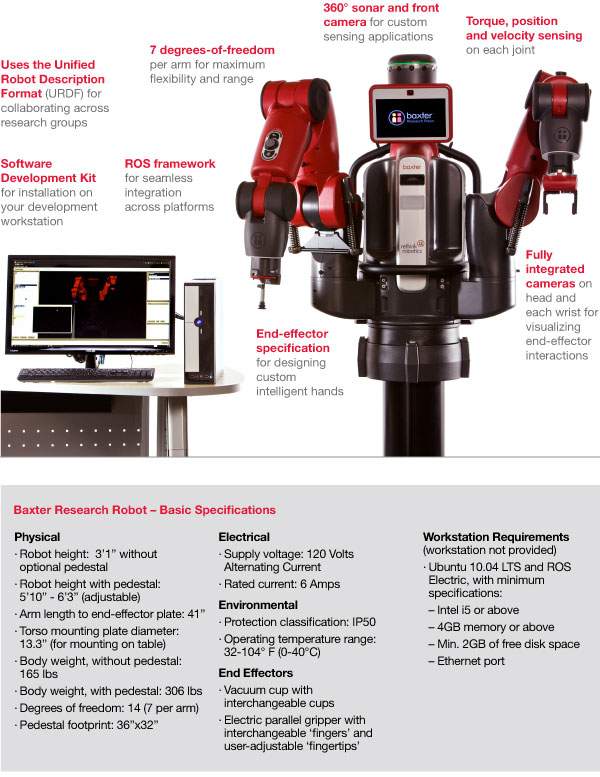
To summarize the above image, Baxter has two arms with 7 degrees of freedom, set in motion by elastic actuators with torque sensors in the motors, three integrated cameras (one on the head and one on each wrist), 360° sonar distance sensors and a tablet for the head .
Rethink Robotics has design two end effectors for Baxter:
Both effectors are offered as additional products to the Baxter robot and are not included by default, leaving you the choice of the grippers. What's more, Rethink Robotics provides all the technical documentation (hardware and software) to create its own gripper. Therefore, you can create your own gripper for Baxter or adapt an existing gripper.
Download the PDF brochure of Baxter robot :

The Baxter robot is proposed here without the pedestal and without grippers. You must add these items to complete your robot if you don't have one.
The research and education version of the Baxter robot differs from the "manufacturing" version only by the software. If both versions use the exact same core software, the research and education version is programmable using a ROS SDK running on top of the core software.
The ROS SDK is well documented and comes with many examples. A ROS master node running on Baxter publishes all state information of the robot as well as the information returned by the motors (position, torque ...), diagnostic information and sensor data. This master node is also able to receive control commands coming from a remote ROS program running on a PC connected to Baxter. This ROS program running on the PC can control Baxter and can be used to build a powerful behaviour with the help of all the libraries of ROS.

All users of the Baxter Research robot interact on a private forum, hosted by Rethink Robotics and its partners, including Generation Robots. As a user, and you will interact with your fellow worldwide including prestigious universities such as MIT.
The Marine Robotics Group at MIT uses Baxter to perform object recognition and object manipulation. John J. Leonard, professor of mechanics at MIT comments the arrival of Baxter: "We 'hired' Baxter and equipped it with a depth sensor X-Tion ASUS, similar to the Kinect, so that Baxter moves independently in a room, scans objects, learn to recognize them and develop strategies to manipulate objects.
"Baxter saves us the tedious task of scanning objects and allows us to focus on the heart of our research."
The Baxter Research robot is used in the Robotics Engineering program of the Worcester Polytechnic Institute in the United States. WPI uses Baxter in order to modernize a course in industrial robotics that was existing before. This course provides an introduction to robotic production systems. The same robot Baxter will be used by the WPI for courses at Master level, including the study of new types of grasping.
Prof. Michael A. Gennert, director of the Worcester Polytechnic Institute comments the arrival of Baxter in his university: "Baxter is particularly well suited for research through its open source SDK based on ROS."
"Our students already learn ROS and use it in their project. They are then able to develop programs for Baxter."
William C. Messner, chair of the department of mechanical engineering at Tufts University explains his choice of Baxter: "The primary reason for our choice of Baxter is its low cost compared to what is available. Moreover, Baxter is safe and gives us the ability to access to motors and sensors through the ROS SDK.
Tufts University offers an original cross disciplinary curriculum from robotics to cognitive science and has great ambitions for the Baxter Research robot in this curriculum. The Human Factors Engineering program explores the interactions between humans and robots when they work in close proximity to each other and examines in particular the possible allocation of tasks maximizing overall performance.