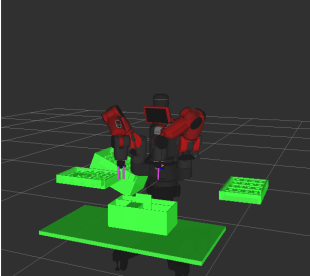
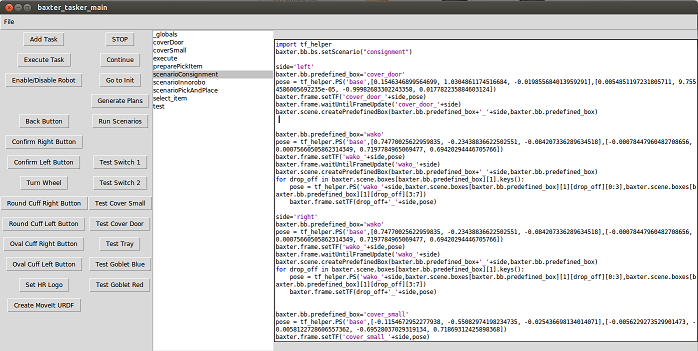
Baxter Tasker is a brand new ROS package intended for the Baxter Research Robot from Rethink Robotics has been released by Generation Robots. Baxter Tasker gives an interface on both the controlling computer and on Baxter, created to set up a simple pick and place behaviour, while generating the Python code for it.Thus you can teach simple behaviours to the robot but complex behaviours will be programmed in Python.
Baxter Tasker: Pick and place for Baxter made easy
Description of Baxter Tasker
Python developers new to Baxter will find the ROS Package useful even the most experienced ones. This is a quick way to get started on the robot.
You may be wondering what the robot is capable of and thanks to the useful classes available in Python displaying the sensor data and how to control the robot, you can easily find out. Through the interface you will have access to the following:
- the display
- the buttons
- the cameras
- the arms
- the infrared distance sensors
- the leds and
- the sonar sensors

For a more advanced control on the robot’s hardware, you can also create two classes where you can add new functions that are automatically added to the graphical user interface. Procedures are also available to save trajectories and information about the environment.
Baxter Tasker: what do I need and how to download it?
The Baxter Tasker has been made for Python 2.7 with ROS Groovy and the current baxter_sdk 0.7.0. We recommend you also to install MoveIt, a tool to create a virtual scene around Baxter for collision free planning.
To get started, just send us a public SSH key to baxter@humarobotics.com and download Baxter Tasker free of charge on our gitserver: git clone git@www.humarobotics.com:baxter_tasker.
Robots available on Génération Robots’ site:
Baxter Research Robot Prototype