Thymio is a small robot you can use to explore the world of robotics and to learn the robot language. It’s designed for a large range of ages because it offers different levels of programming.
This article explains the differences between the three types of programming: VPL, Blockly, Text (and you’ll know more about Scratch for Thymio!).
Do you want to get a head start in teaching coding to kids?
 |
 |
 |
There are three levels of Thymio robot programming, each offering different features but all requiring the same software, which you can download here: https://www.thymio.org/fr:start
But what the main differences between these languages?
Visual programming (VPL)
This is the easiest type of programming.
There is an interface designed for children that allows you to control the robot very quickly. Simply assemble the small icons together to trigger actions initiated by the selected sensors.
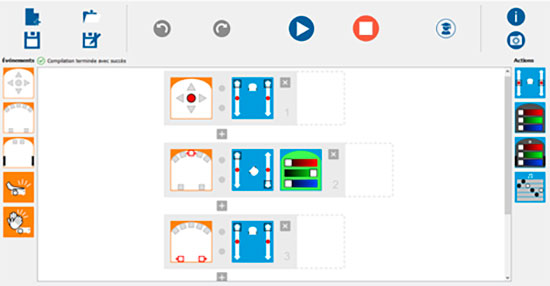
To save the program in Thymio, you just click on the green arrow (“play”) to send the program to the robot. It’s as simple as that – your Thymio robot is already capable of moving, emitting light and sound and avoiding obstacles.
This type of programming is ideal for pupils at primary school and in the first years of middle school.
Block-structured programming (Blockly)
This type of programming takes us a step closer to text-based programming, because it allows you to create conditions and sensor-dependent loops and to trigger the Thymio robot’s actuators.
It requires a bit more logic to make it work than with the previous type of programming.
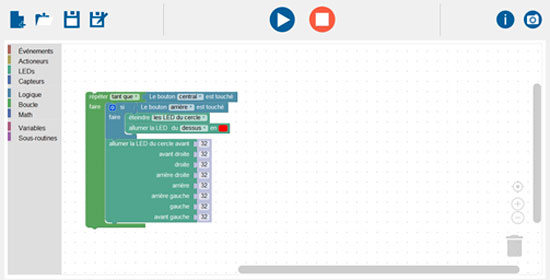
This type of programming is designed for middle school pupils.
Text-based programming
Text-based programming is used to program a large number of robots.
Once you’ve mastered it, it’s a much more rapid and powerful form of programming. In this context, it can be used to launch “fast” features, requiring users to simply click on the action they want in order to start it.
The interface also offers more advanced features, like displaying the values of the robot’s sensors which you can then use to more accurately adjust your robot’s behaviour.
Text-based programming uses the same logic as block-structured programming. If you want Thymio to avoid a line, for example, you need to create a condition for the sensors THEN activate the servo motors.
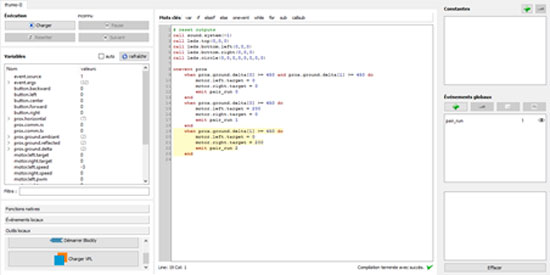
Even so, most people will have no problems with the interface because all of the functions required to program the robot are pre-recorded in the software. You simply have to choose the right settings to make your robot more intelligent!
This type of programming is intended for secondary school and even first-year higher education students.
Thymio/Scratch compatibility
Long awaited, the Asebascratch software link allows the Scratch programs and its sprites to interact with your Thymio II or Wireless Thymio robot. So you can include your Thymio robot as a sprite in a Scratch scene.
How to easily set up Scratch for Thymio?
- Download and install the Aseba Studio Suite
- Download and install the Scratch 2 Editor
- Download and install the Scratch2-ThymioII Link
- Link your Thymio to the computer (WiFi or USB)
- Double-click “Scratch2-ThymioII” to run the helper
- Open one of the Scratch 2 examples (Thymio-II.sb2)