Vérifier le bon fonctionnement de votre Thymio
Thymio qui ne cesse de nous surprendre, de sa capacité à faire de la peinture numérique ou à se transformer en animaux, mais il lui arrive parfois de nous faire des mauvaises surprises. En effet, bien que ce robot soit robuste, il lui arrive d’être défectueux.
Pour vous aider à résoudre les problèmes les plus fréquents, nous avons rédigé ce petit guide qui vous permettra de valider le fonctionnement de la plupart des capteurs et actionneurs de votre Thymio 2.
Dans le cas où votre robot mobile Thymio ne s’allume pas, ou bien s’il n’est pas détecté lorsque vous le branchez via USB, reportez-vous à la section « Résolution des problèmes les plus courants » située à la fin de ce guide.
Préparation du robot Thymio II
- Connecter Thymio à votre port USB et Lancer Aseba Studio
- Vérifier que vous êtes en rafraîchissement automatique (Auto coché)
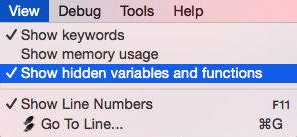
- Ajouter les variables cachées en allant dans ‘Vue’ puis en sélectionnant ‘Montrer les variables et les fonctions cachées’
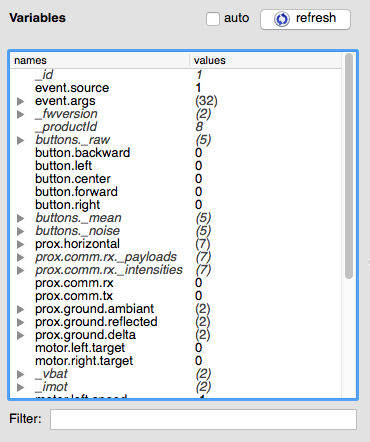
- Vous devriez obtenir l’affichage suivant:
Vérification du firmware du robot Thymio II
En déroulant la variable ‘_fwversion’, vous obtiendrez le numéro de version du firmware. La version actuelle est 8 (dans le premier champ [0]). Si ce n’est pas la version qui s’affiche, nous vous recommandons de procéder à la mise à jour du firmware en suivant les instructions sur cette page du site Thymio & Aseba (n’oubliez pas de quitter Aseba Studio avant de vous lancer dans cette mise à jour !)
Vérification des capteurs de proximité
Localisation
Sept capteurs de distance sont disposés sur le pourtour du Thymio : cinq situés à l’avant et deux à l’arrière.
Vérification
Le plus simple pour vérifier ces capteurs est de passer la main devant chaque capteur et de s’assurer qu’ils répondent tous correctement. Les capteurs numéro 5 et 6 sont ceux situés à l’arrière.
Valeurs
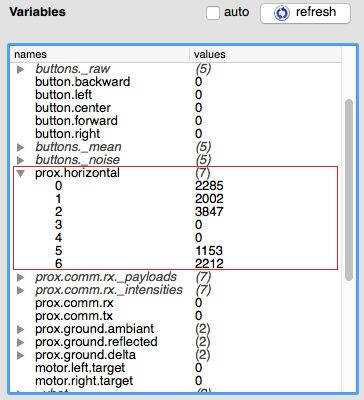
Les valeurs obtenues par ces capteurs sont lisibles dans les variables ‘prox.horizontal’. Signification des valeurs obtenues par ces capteurs :
- 0 => aucun obstacle n’est détecté
- Approx. 4000 = >l’obstacle est au plus près du capteur, sans le toucher
Vérification des capteurs de ligne au sol
Localisation
Thymio possède deux capteurs de détection de sol situés à l’avant sous le robot.
Fonctionnement
Le robot détecte d’une part l’intensité de la lumière ambiante (‘prox.ground.ambiant’) et d’autre part la lumière réflechie par le sol (‘prox.ground.reflected’). En faisant la différence entre les deux (‘prox.ground.delta’), Thymio peut arriver à déduire l’absence ou la présence d’un sol.
Valeurs
- Approx. 0 => Thymio loin du sol
- Valeur positive => Thymio au sol
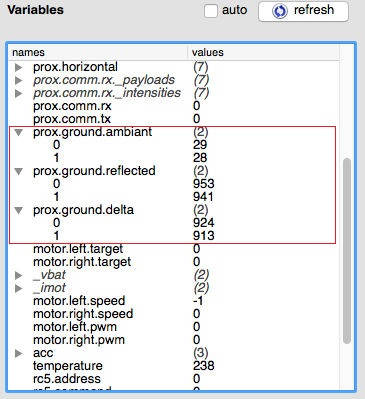
ATTENTION : cette variable positive sera différente selon la nature du sol (autour de 20 pour un sol noir et 1000 pour un sol blanc)
Vérification du microphone
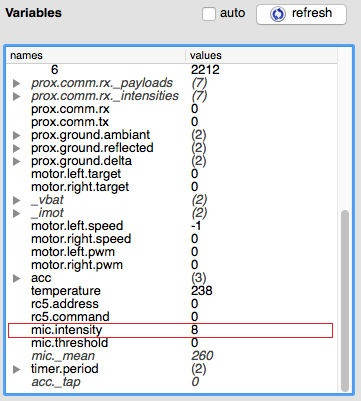
Il s’agit de la variable ‘mic.intensity’. A moins d’un silence absolu, celle-ci sera toujours légèrement au-dessus de 0 (entre 5 et 10 en environnement calme). Tapotez un peu fortement sur le robot avec les doigts, vous devriez voir la valeur fluctuer de plusieurs dizaines jusqu’à environ 200.
Vérification de l’accéléromètre
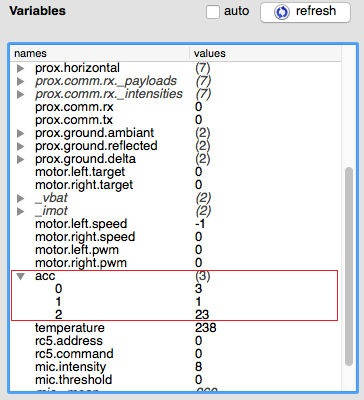
L’accéléromètre est lisible dans la variable ‘acc’.
Valeurs
Les trois valeurs correspondent aux 3 axes.
- Lorsque votre Thymio est posé normalement sur le sol, la dernière valeur doit être élevée (autour de 20-25) et les deux autres proches de 0. La valeur élevée indique l’accélération due à la gravité.
- Si vous faites pointer votre Thymio vers le haut, c’est la deuxième composante qui devrait prendre la valeur de 20 et les autres proches de 0.
- De même, si vous mettez votre robot sur le tranche, c’est la première composante valeur qui sera autour de 20 (ou -20 selon de quel côté vous le posez) et les autres autour de 0.
Vérification des moteurs et des capteurs de vitesse
Vérification des capteurs de vitesse
Les variables ‘motor.left.speed’ and ‘motor.right.speed’ indiquent la vitesse de rotation des roues.
Valeurs
- 0 => Roues au repos (avec parfois une légère déviation entre 1 et 5).
Si votre Thymio n’avance pas droit, cela peut être un problème dû à cette déviation.
Pour corriger ce problème, nous vous conseillons de suivre la procédure de calibration décrite sur cette page du site Thymio & Aseba
Voici une vidéo expliquant la procédure de calibration:
Vérification des moteurs
Pour tester les moteurs de votre Thymio, mettez le robot sur le dos et entrez le code suivant:
motor.right.target=100
motor.left.target=100
Vous pouvez alors charger et lancer le programme. Les roues devraient se mettre à tourner à la même vitesse. Les capteurs de vitesse indiqueront une valeur oscillant autour de 100 (pouvant aller de 80 à 120 environ à cause du bruit).
Chargez et lancez le programme suivant pour arrêter le robot:
motor.right.target=0
motor.left.target=0
Vérification des boutons
Localisation
Thymio possède 5 boutons sur le dessus qui correspondent aux variables ‘button.backward’, ‘button.forward’ , ‘button.left’, ‘button.right’ et ‘button.center’.
Valeurs
- 0 => le bouton n’est pas enfoncé
- 1 => le bouton est enfoncé
Vérification
Vérifiez bien que la valeur de chaque bouton passe à 1 lorsque ce dernier est enclenché (maintenir le bouton appuyé jusqu’à ce qu’Aseba studio rafraichisse l’état des capteurs).
Résolution des problèmes les plus courants
Les deux principaux problèmes pouvant survenir avec Thymio sont les suivants :
Votre robot ne se charge plus
- Commencez par vérifier que votre câble USB ne soit pas défectueux en faisant un test avec un câble différent (la plupart des smartphones ont un câble Micro-USB du même format que Thymio).
- Si le problème persiste, alors c’est que la batterie de Thymio est en décharge profonde (ou bien qu’elle est défectueuse, ce qui peut malgré tout arriver, auquel cas il vous faudra contacter notre SAV).
Pour sortir Thymio de ce mode, utilisez un chargeur USB mural (vous en trouverez souvent avec les smartphones et tablettes). Ces chargeurs envoient normalement un courant 5V à 1A (au lieu de 500mA des ports USB d’un ordinateur). - Branchez le robot, et appuyez sur le bouton reset (le petit trou sur le côté gauche). Laissez ensuite le robot charger pendant 2h.
Votre robot ne veut pas s’allumer correctement, se comporte de manière erratique ou se connecte et déconnecte de l’USB sans fin.
Il s’agit probablement d’un cas de corruption du firmware. la seule option est alors d’essayer de remettre à jour votre firmware en suivant les instructions sur cette page du site Thymio & Aseba.
N’hésitez pas à essayer à plusieurs reprises si cela ne marche pas du premier coup !
Rendez-vous sur la page support du fabricant si vous avez besoin de plus de détails sur la résolution des problèmes rencontrés par Thymio.