
In order to make Baxter robot even more collaborative, the GR Lab , Generation Robots’ engineering team, decided to fit upon it the most famous depth measuring sensor: The Kinect camera. There is nothing more natural for a collaborative robot than to directly interact with someone, if he instantly detects this person in its surroundings.


Why embed a Kinect camera and why feature it on Baxter robot’s head?
Thanks to the Kinect camera and the ROS Openni tracker package ( http://wiki.ros.org/openni_tracker ) the potential operators are detected within an area. There was a question as to where and how to fit the Kinect camera. The main criteria regarding the camera position is its viewing angle. The camera should have been able to observe its environment without any obstacles hindering Baxter robot movements.
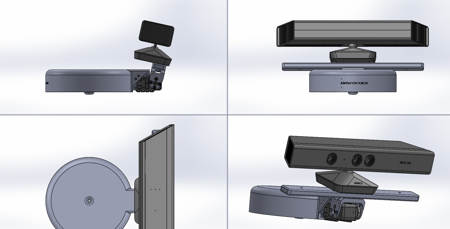
So Baxter’s head came as the best position possible for the Kinect camera. A head mount replacing Baxter collaborative robot’s one was thus designed and 3D printed. This head mount is compatible with both Kinect V1 but also Kinect for Windows 8 (V2).

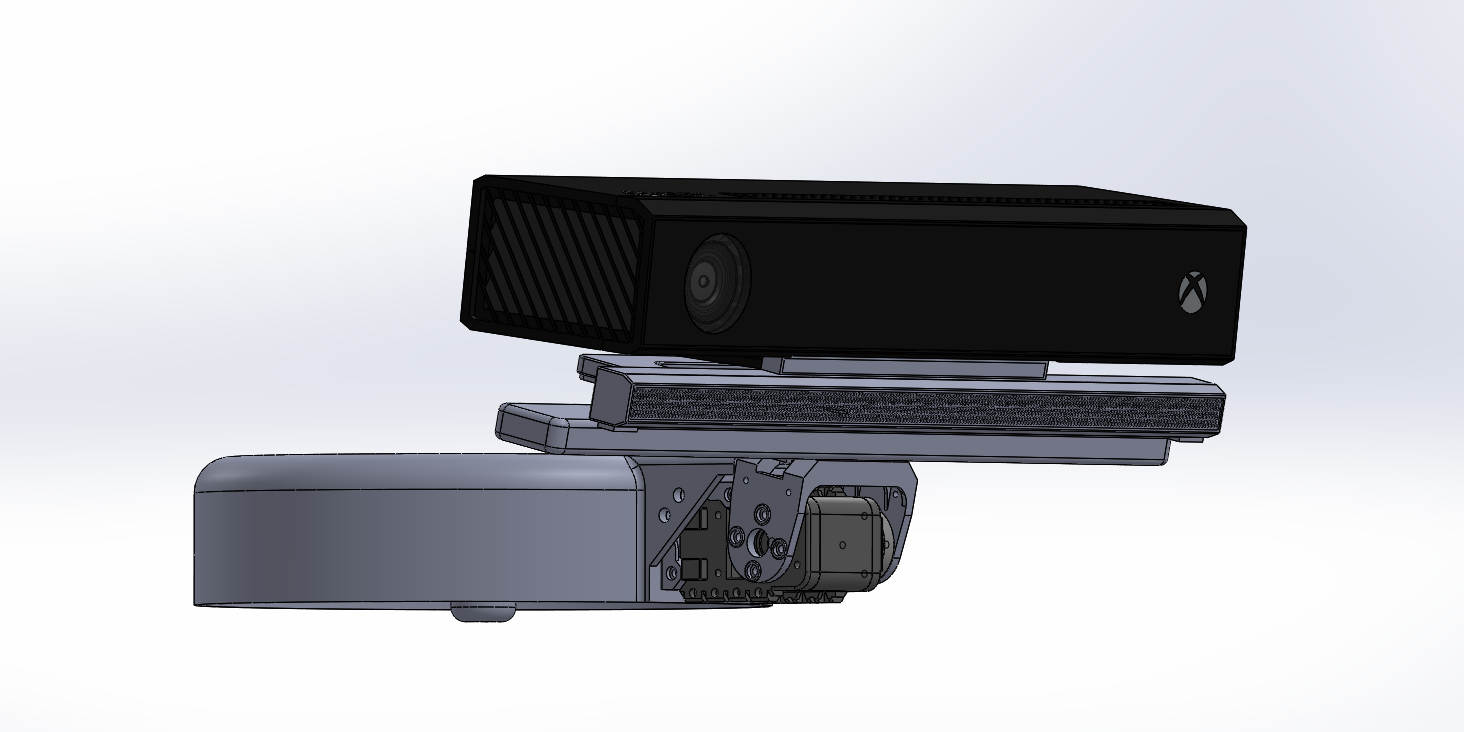
Consideration on the way to control the tilt angle of the Kinect camera
In order to make the human-robot interaction more effective our engineering team decided to control the Kinect tilt angle. The goal was that once Baxter identified a potential operator, the camera must follow this operator and not lose this operator anymore. All of this in order to have the human-robot interaction as functional as possible.
The control of the Kinect tilt angle has been made possible thanks to a Dynamixel AX-18A servomotor whose position has been anticipated on Baxter new head mount. We adjusted the tilt of the Kinect camera to the operator’s height using the ROS-compatible and Python Dynamixel library .

You can download below the STL Files:
Products available on Generation Robots’ website to create your own motorized head mount: