Les acteurs de l’industrie automobile échangent fréquemment entre eux à propos des défis et des opportunités que représentent la création d’une entreprise spécialisée dans les véhicules autonomes.
Étrangement, peu de temps est consacré à parler de l’architecture de ces véhicules. Le constructeur américain de LiDAR, Ouster, s’est penché sur le sujet, afin de concevoir des LiDAR pensés spécifiquement pour ces véhicules..
Les différents niveaux de véhicules autonomes
L’association Society of Automotive Engineers (SAE), qui regroupe 138 000 experts et ingénieurs dans le domaine de l’automobile et de l’aérospatial, a créé une échelle à 5 niveaux pour classifier le degré d’autonomie des IA embarquées dans les voitures autonomes.
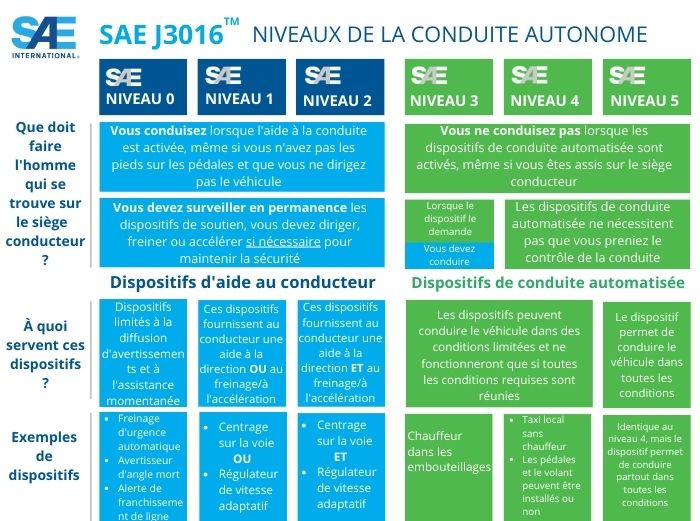
Aujourd’hui, les véhicules commercialisés atteignent le niveau 2 d’automatisation (parfois appelé « 2+ ») et s’appuient sur un ensemble de capteurs composé de caméras, d’un radar frontal et d’un LiDAR à faible résolution. Derrière cette suite de capteurs se trouve un stack de traitement très basique.
Pour espérer atteindre les niveaux 4 et 5 de la norme SAE, les industriels doivent surmonter quelques obstacles techniques majeurs :
- Perception et localisation précises dans tous types d’environnements
- Prise de décision en temps réel plus rapide dans diverses conditions
- Des systèmes fiables et rentables pouvant être commercialisés en grandes quantités
Pour résoudre ces problèmes, il faudrait un stack de hardware doté d’un ensemble de capteurs plus puissants et d’une infrastructure informatique plus rapide.
Les différents capteurs d’un véhicule autonome
1) LiDAR
Le LiDAR est utilisé sur tous les véhicules prototypes de niveau 4 ou 5, en raison de sa capacité à fournir des informations précises sur la profondeur et l’environnement. Ces données, représentées par un nuage de points en 3D, complètent les données des caméras et des radars pour classer plus rapidement et plus précisément les objets situés autour du véhicule.
Avantages
- Informations très précises sur la profondeur (portée)
- Fonctionne de jour comme de nuit, quel que soit l’éclairage et les conditions extérieures
- Résolution moyenne (beaucoup plus élevée que celle du radar, moins élevée que celle de la caméra)
Inconvénients
- Débit de données élevé
- Coût onéreux
- Format plus grand que les autres capteurs

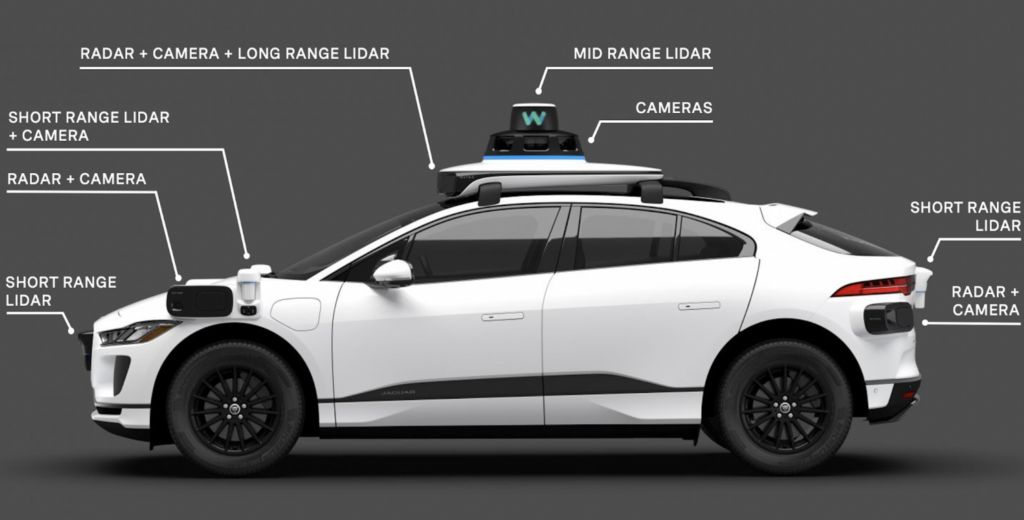
Un véhicule autonome standard comprend des LiDAR à courte, moyenne et longue portée placés à différents endroits du véhicule.
Intégration
- 4 LiDAR courte portée sur les bords du véhicule, utilisés pour identifier les risques potentiels aux abords immédiats du véhicule (petits animaux, plots, bordures) que les conducteurs humains pourraient ne pas voir. Cette configuration comprend un capteur sur la calandre du véhicule, deux capteurs près des rétroviseurs latéraux et un capteur sur le hayon du véhicule.
- 2 LiDAR moyenne portée placés en biais sur les bords du toit du véhicule, utilisés pour la cartographie et la localisation.
- 2 LiDAR longue portée placés sur le toit du véhicule, utilisés pour détecter les objets sombres et les obstacles potentiels à l’avant du véhicule lorsqu’il roule à grande vitesse. Ces capteurs sont généralement au nombre de deux et peuvent être orientés à 360° ou vers l’avant.
2) Caméra
Les caméras constituent le noyau traditionnel du stack de perception d’un véhicule autonome. Les véhicules de niveau 4 ou 5 sont équipés de plus de 20 caméras placées autour du véhicule, qui sont ensuite alignées et calibrées pour créer une vue à 360° de l’environnement, en très haute définition.
Avantages
- Haute résolution et couleurs dans un réseau 2D
- Peu coûteuses
- Facile à intégrer (peut être presque caché dans la voiture)
- Voit le monde de la même manière que les humains
Inconvénients
- Sensible aux conditions de luminosité variables et aux conditions météorologiques défavorables
- La vue à 360° nécessite un travail de calcul très gourmand en ressources pour assembler les images
3) Radar
Au cours des 15 dernières années, les radars sont devenus monnaie courante dans les applications automobiles. Le radar fournit des nuages de points en 3D de son environnement en utilisant des ondes radio.
Avantages
- Informations sur la profondeur des objets et de l’environnement
- Peu coûteux
- Robuste
- Insensible aux conditions météorologiques défavorables (pluie, neige)
- Longue portée
Inconvénients
- Faible résolution
- Faux négatifs avec les objets stationnaires et les obstacles critiques
Intégration
- Pour les véhicules autonomes de niveau 4 et 5, le radar est placé à 360º autour du véhicule et sert d’unité fiable pour la détection des objets.
- Jusqu’à ~10 radars, y compris sur les rétroviseurs latéraux, dans la calandre, le pare-choc arrière ou dans les coins du véhicule.
Ces trois capteurs ont chacun leurs avantages et leurs inconvénients. Cependant, en les combinant, ils forment un ensemble de capteurs très robuste qui permet une conduite autonome de niveau 4 et 5.
Compte tenu du nombre de capteurs déployés sur ces véhicules, les besoins en traitement sont énormes. Examinons maintenant les différentes façons de relever ce défi.
Les différents processeurs d’un véhicule autonome
Il existe deux approches principales pour traiter l’énorme quantité de données générées par l’ensemble des capteurs : le traitement centralisé ou le traitement distribué (ou Edge Computing).
1) Traitement centralisé
Avec le traitement centralisé, toutes les données brutes du capteur sont envoyées et traitées par une seule unité centrale de traitement.
Avantages : Les capteurs sont petits, peu coûteux et peu gourmands en énergie.
Inconvénients
- Nécessite de disposer de chipsets coûteux dotés d’une puissance et d’une vitesse de traitement élevées
- Latence potentiellement élevée des applications, l’ajout de capteurs nécessite des demandes de traitement supplémentaires
2) Traitement distribué (Edge Computing)
Avec le Edge Computing, seules les informations pertinentes de chaque capteur sont envoyées à une unité centrale, où elles sont compilées et utilisées pour l’analyse ou la prise de décision.
Avantages
- Bande passante réduite
- Interface moins coûteuse entre les capteurs et le CPU
- Latence des applications plus faibles, besoin de moins de puissance de traitement. L’ajout de capteurs supplémentaires n’augmentera pas drastiquement les besoins en termes de performances
Inconvénients : Exigences plus élevées en matière de sécurité fonctionnelle
Il existe des CPU particulièrement adaptés au Edge Computing, comme la NVIDIA Jetson Orin.
Le Edge Computing est en train de devenir la technologie de choix pour les véhicules autonomes, car il permet de traiter simultanément et en temps réel le nombre croissant de signaux de capteurs à forte intensité de données.
Pour illustrer les avantages de cette approche, Ouster a utilisé le logiciel de Teraki pour fusionner un LiDAR Ouster et une caméra HD.
Le logiciel Teraki, une solution efficace pour le traitement de données
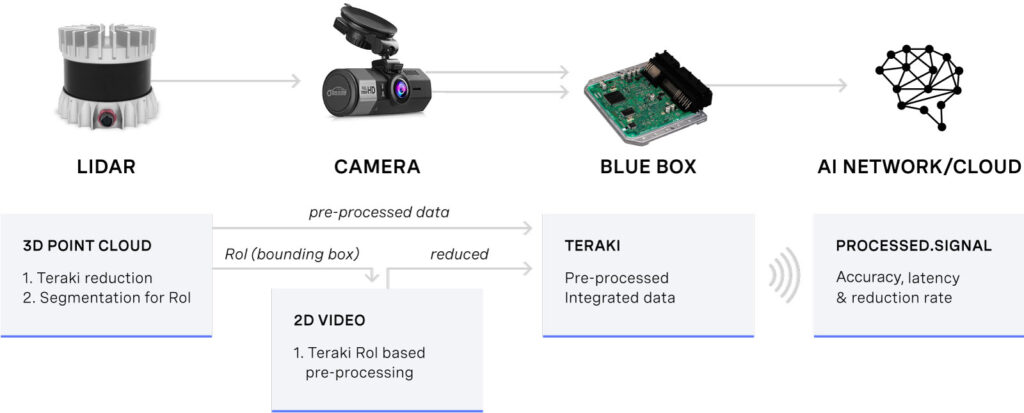
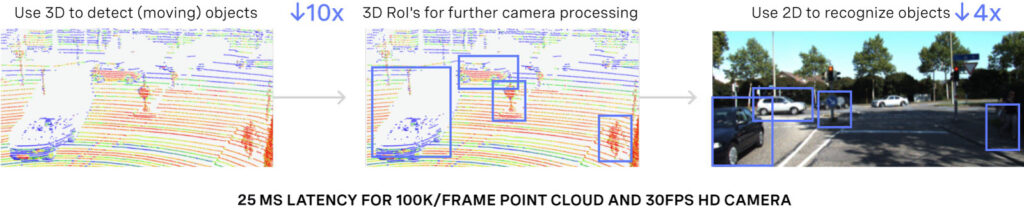
Le LiDAR Ouster génère des données de nuage de points haute résolution qui cartographient l’environnement autour du capteur. Les informations à haute densité produites par le LiDAR (jusqu’à 250 Mbps pour les capteurs à 128 canaux) rendent le traitement rapide trop difficile pour le hardware de la voiture.
La combinaison de ces informations et les calculs complexes nécessaires au traitement vidéo, permettant de prendre des décisions justes et immédiates, représente un défi majeur pour les applications de conduite autonome.
Le logiciel Teraki permet de résoudre ce problème grâce à une sélection intelligente des informations issues des capteurs. Le logiciel détecte et reconnaît les zones d’intérêt à partir du nuage de points 3D de Ouster, les compresse et ne transmet que les informations pertinentes à l’ordinateur. La zone d’intérêt détectée est transmise à la caméra et superposée aux données vidéo.
Conclusion
L’utilisation de ce logiciel et du Edge Computing permet d’améliorer les algorithmes de cartographie, de localisation et de perception. Cela signifie : des véhicules plus sûrs, qui prennent de meilleures décisions, presque en temps réel. Une nouvelle étape vers les véhicules autonomes de niveau 4 et 5.
Preuve de l’efficacité de ce type de logiciels ? Des robots taxis sont récemment apparus dans les rues de San Francisco. Entre enthousiasme et controverse, l’introduction de ces véhicules marque une avancée significative dans le domaine des transports autonomes.