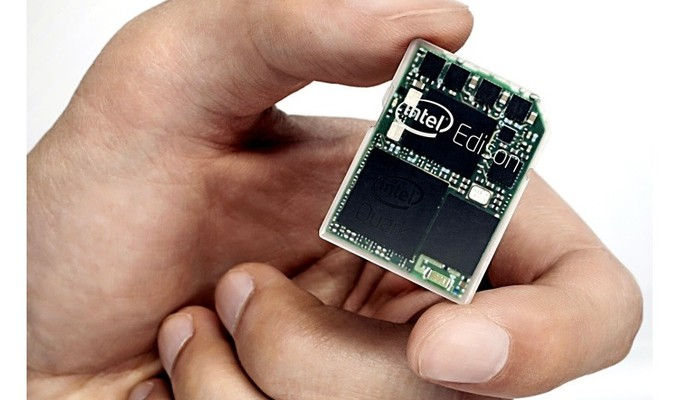
5 idées de projets avec la carte Intel Edison
Découvrez la carte Intel Edison… petite mais puissante ! Avez-vous déjà entendu parler de la carte Intel Edison ? Cette nouvelle plateforme est un véritable ordinateur faisant la taille d’une carte SD ! Un fort potentiel, donc, pour toutes les applications « wearable » (technologies vestimentaires) et les projets dans le domaine de l’ Internet[…]
Read this article >>