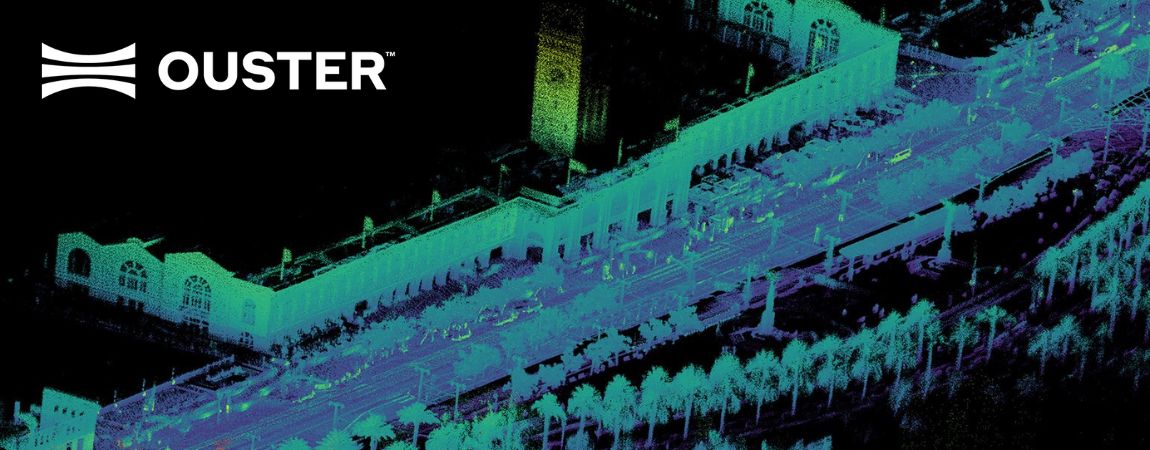
Ouster REV 7: una gamma di LiDAR ad alte prestazioni
Ouster supera ancora una volta i limiti del Lidar digitale con il lancio della REV7, una gamma di sensori alimentati da chip L3. Quest’ultimo ne migliora notevolmente la portata, la precisione e l’affidabilità dei dati. A questa nuova gamma si aggiunge anche il OSDome, un LiDAR emisferico che offre una visione completa dal pavimento al[…]
Read this article >>