-
 Visit our shop
Visit our shop
-
Italiano

I robot mobili autonomi sono diventati strumenti essenziali per la ricerca e l’innovazione. Husarion, azienda specializzata in robotica mobile, offre soluzioni avanzate per soddisfare le esigenze di ricercatori e ingegneri di tutto il mondo. Attraverso diversi progetti di ricerca, scopri come il robot Panther di Husarion si stia affermando come soluzione innovativa in ambienti complessi quali l’aviazione e l’agricoltura.
In un hangar, la navigazione robotica è resa difficile dalla mancanza di elementi marcati: dall’illuminazione variabile e dalle superfici riflettenti che interferiscono con i sensori. Metodi di localizzazione tradizionali, quali il GPS, risultano inefficaci, mentre le IMU e gli odometri sono soggetti a deriva e imprecisione.

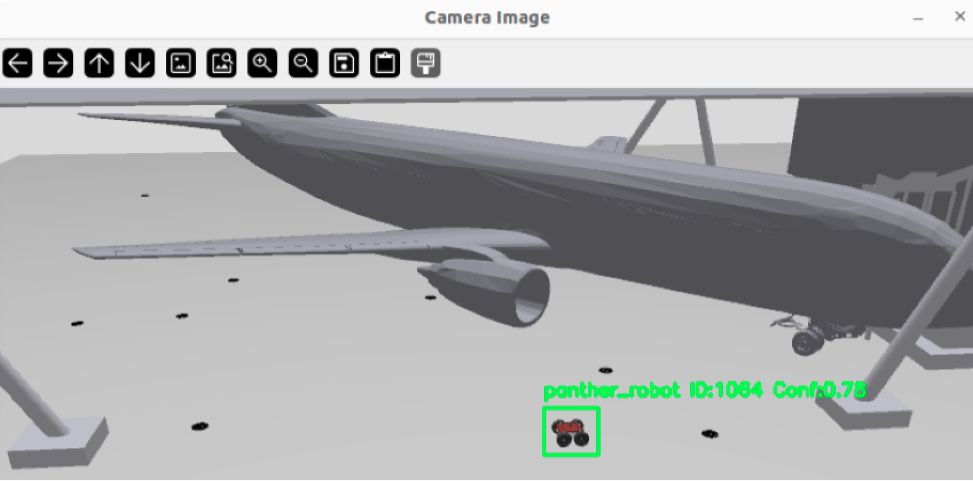
Una studentessa di robotica dell’Università di Cranfield ha avuto l’idea di utilizzare diverse telecamere esterne per catturare le immagini del robot Panther all’interno dell’hangar. Queste immagini vengono poi elaborate con il modello di deep learning YOLOv8, che consente di rilevare gli oggetti in tempo reale e di calcolare le coordinate dei pixel, successivamente trasformate in posizioni reali nello spazio.
Per migliorare l’accuratezza della localizzazione, i dati provenienti da telecamere esterne, IMU e odometri vengono combinati utilizzando tecniche di fusione sensoriale, utilizzando in particolare il filtro di Kalman esteso (EKF).
Un altro metodo di localizzazione è l’uso della tecnologia a banda ultralarga (UWB) per migliorare la precisione di navigazione del robot Panther. Uno studente di robotica ha integrato nel robot i beacon UWB, combinati con sensori tradizionali quali LIDAR, IMU e odometri. Grazie alla fusione sensoriale tramite EKF, questa configurazione raggiunge un’accuratezza di livello centimetrico anche in ambienti chiusi e disordinati.
Grazie all’integrazione dell’UWB, il progetto ha mostrato miglioramenti significativi nell’accuratezza della localizzazione. I test iniziali hanno rivelato un miglioramento del 30% nella precisione di localizzazione rispetto all’utilizzo del solo SLAM Toolbox. Le prossime tappe prevedono test reali negli hangar e l’ampliamento delle capacità dei sensori per una navigazione ancora più precisa con l’integrazione di telecamere 3D e di un LIDAR 3D.


L’Alleanza Bioversity e CIAT stanno esplorando come la robotica e le tecnologie digitali possano trasformare l’agricoltura e contribuire a preservare l’ambiente.


“Abbiamo scelto Panther per la reputazione di Husarion, che ci è stato presentata nel 2019 con il ROSbot, utilizzato per l’insegnamento nel nostro AI and Robotics Innovation Lab presso RMIT. Siamo rimasti colpiti dalla qualità delle piattaforme Husarion e dalla reattività del loro team che ci supporta sia con il software che con l’hardware”.

Marine Senecat
Responsabile dei contenuti presso Génération Robots