
Le robot éducatif mBot 2, sorti début 2021, présente plusieurs évolutions par rapport à la V1. Dans cet article, nous faisons le tour des différences entre le robot mBot et le mBot2. C’est parti !
La CyberPi remplace la carte mCore
Le robot mBot 2 embarque la carte CyberPi, un micro-ordinateur qui embarque entre autre :
- 1 écran couleur 128 x 128 pixels
- 3 boutons-poussoirs
- 1 joystick
- Plusieurs capteurs et actionneurs (capteur de lumière, micro, WiFi et Bluetooth, 5 LED RVB, accéléromètre/gyroscope 3 axes, haut-parleur)
CyberPi a été conçu pour l’apprentissage de la programmation, mais aussi pour la découverte de l’IA, du réseau et de l’Internet des Objets (IoT).
La carte mCore, qui était le cerveau du premier mBot, n’était pas aussi riche et embarquait uniquement un bouton-poussoir, un buzzer, un capteur de lumière, 2 LED RGB, un récepteur et un transmetteur infrarouges.
La carte CyberPi peut enregistrer 8 programmes, contre un seul pour la mCore.
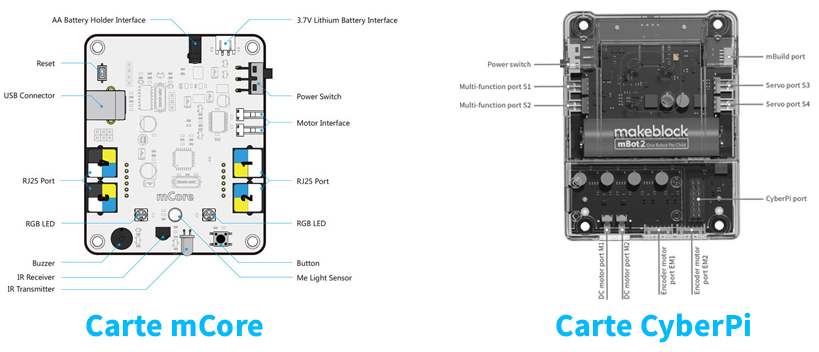
Plus de connecteurs
La version 1 du robot mbot intègre 4 connecteurs permettant l’ajout d’accessoires supplémentaires. Sur la V2, il est possible de connecter 2 moteurs CC supplémentaires, et 5 modules ou 4 servomoteurs (et même un capteur Arduino !)
Attention, le format des connecteurs a changé ! Ce ne sont plus des connecteurs RJ25 mais des connecteurs mBuild, compatibles avec les modules mBuild conçus par MakeBlock.
Une réelle amélioration au niveau des capteurs
Le capteur de distance à ultrasons, désormais protégé par un boîtier en plastique, possède maintenant 8 LED programmables individuellement (ce qui remplace la fameuse matrice de LED).
Le nouveau module de suivi de lignes (Quad RGB) possède 4 capteurs et surtout, il peut détecter les couleurs. On peut ainsi imaginer une lecture de codes couleurs disposés sur le sol comme le fait le robot Ozobot. Le mBot 2 est également moins sensible aux interférences créées par la lumière ambiante.
Le capteur de la V1 ne pouvait distinguer que le sol clair d’un sol foncé 2 capteurs).
Des moteurs plus précis (ajout d’encodeurs), plus robustes, plus rapides
Grosse nouveauté au niveau des moteurs du robot : ceux-ci sont désormais dotés d’encodeurs, leur offrant une meilleure précision (5°). La vitesse de rotation passe de 118 à 200 RPM et le couple est plus que doublé. L’arbre de sortie des moteurs est en métal (et plus en plastique), garantissant une meilleure solidité en cas de chute.
La carte de contrôle du mBot est équipée du même microcontrôleur que l’Arduino Uno.
Autres petits changements…
Le châssis de le la V2 est légèrement plus grand, et percé de plus de trous pour fixer plus de modules ou d’accessoires.
La roue folle métallique située à l’avant du robot a été remplacée par une version en nylon, moins bruyante.
Contrairement à la première version, le mBot 2 embarque le Bluetooth et le WiFi, pas besoin d’acheter de dongle supplémentaire ! Il est ainsi possible de connecter rapidement plusieurs robots en réseau.
Une batterie de 2500mAh est intégrée avec le robot mBot 2, le mBot incluait un support de piles (batterie en option, piles à acheter séparément).
Le robot mBot 2 tient dans sa boîte une fois qu’il a été monté, un petit plus non négligeable !
Compatible mBlock 5 et Python Editor
Comme le robot mBot, le mBot 2 est compatible et programmable avec mBlock 5 (une interface de programmation basée sur Scratch 3) en bloc et en Python.
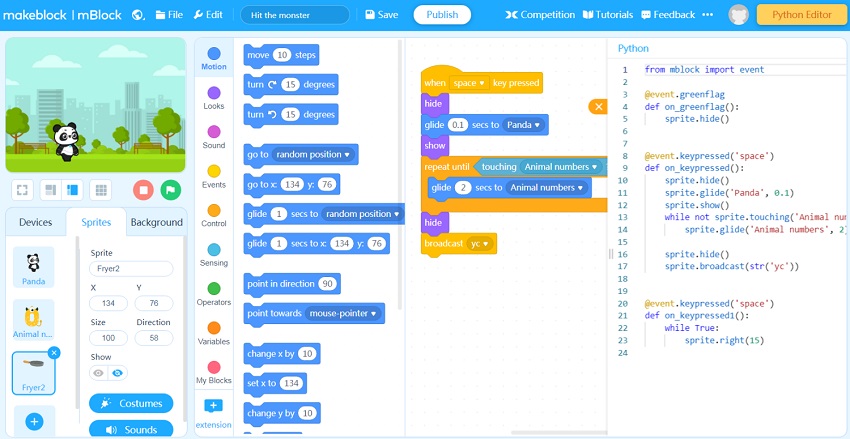
Il est également possible de le programmer avec l’éditeur Python de MakeBlock. Là aussi, la version 5 de mBlock a été pensé pour des projets d’IoT ou d’IA. Il est par exemple possible d’exploiter les données des capteurs, d’afficher des courbes, etc.
