Pour faciliter le quotidien des agents de la SNCF, des solutions robotiques du marché ou des plateformes robotiques customisées sont testées régulièrement sur les applications ferroviaires. En effet, les trains et le réseau ferroviaire nécessitent d’être constamment surveillés et inspectés, afin de pouvoir effectuer des tâches de maintenance garantissant la sécurité des usagers.
En mars 2022, la SNCF a appelé Génération Robots afin de voir si le robot Spot pouvait accomplir efficacement des missions d’inspection des rames Transilien à 2 niveaux.
Pourquoi Spot ?
Son design lui permet de se déplacer dans des escaliers, contrairement aux robots mobiles roulants.
Les fonctionnalités du robot peuvent être améliorées facilement grâce aux différents add-ons (payloads) :
- Vision couleur en basse luminosité
- Accès au SDK et développement d’applications custom
- Vision panoramique
- Etc
Très agile et robuste, il est capable de monter et descendre des marches ou des escaliers, en autonomie ou en téléopération.
- Charges utile max : 14 kg
- Autonomie moyenne : 90 min
- Hauteur de marche max : 300 mm
Spot est un robot robuste, très agile et polyvalent, pouvant être utilisé dans un grand nombre de missions :
- Exploration
- Surveillance et sécurité
- Inspection
- Cartographie
Les missions prévues par la SNCF pour Spot
- Désinfection des trains
- Contrôle de présence de passagers en bout de ligne
Déroulement du test et conclusion
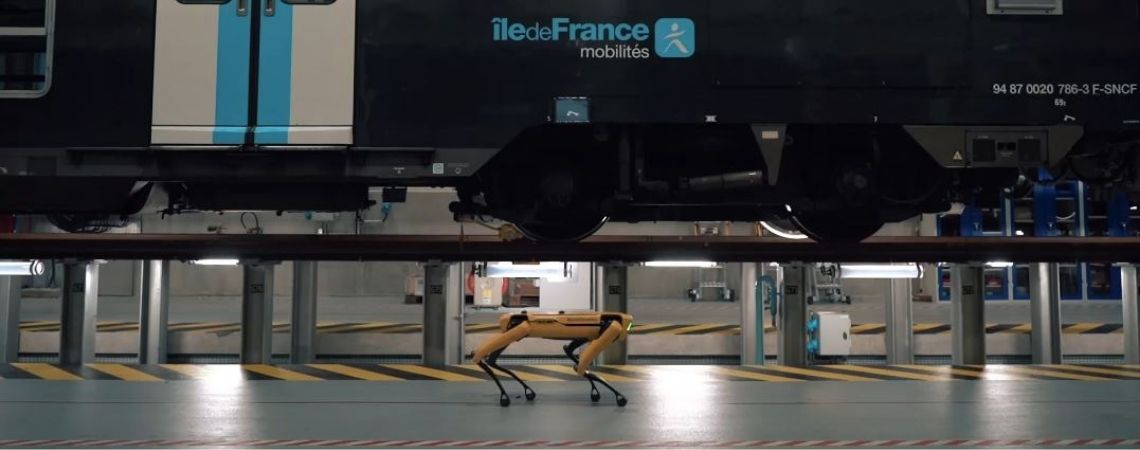
L’objectif était de tester le robot Spot en environnement réel, dans des rames Transilien à 2 niveaux (Z2N) du technicentre industriel de Saint-Pierre-des-Corps.
L’équipe sur place était composée de Mathis Godard, ingénieur roboticien chez Génération Robots, et de Louis-Romain Joly, responsable du programme « Robots & Humains » et Clara Cussaget, ingénieure roboticienne de la Direction Technologies, Innovation et Projets Groupe (SNCF).
Le robot était parfaitement capable de se rendre au niveau 1 et au niveau 2 des rames de train, et d’effectuer ses tâches d’inspection avec sa caméra. Par contre, la travée entre les sièges ne fait que 60 cm de large, là où Spot a besoin de 65 cm de large pour se mouvoir en autonomie (avec la détection d’obstacles activée).
Tests effectués :
- Passage du robot entre 2 palettes placées verticalement pour déterminer la largeur minimale requise (65 cm)
- Arrimage d’un bidon rempli d’eau sur le robot afin de voir si les mouvements de l’eau affecte ceux du robot (non)
- Montée et descente de marche à la même vitesse de déplacement que sur du plat (possible)
Conclusion :
Un robot à quatre pattes convient parfaitement à l’environnement et à l’inspection des rames à 2 niveaux. Par contre, les dimensions actuelles du robot Spot sont incompatibles avec les rames transiliens Z2N.
Mise à jour juillet 2024 : le firmware du robot Spot fait l’objet de mises à jour fréquentes, et si le robot Spot refaisait la même batterie de tests maintenant, il y aurait de nets progrès dans leur complétion.
Spot Enterprise Package

- Charge utile de 14 kg
- Perception à 360° grâce à ses 5 paires de caméras
- Vitesse de 5,7 km/h
- 90 minutes d’autonomie
- Capacité de montée de +/- 30°