
Ein Gehäuse, das von GR Lab speziell für die beliebten mobilen Roboter von AgileX Robotics entwickelt wurde. Ein ROS-Forschungs- und Entwicklungsset, das die Bedeutung und Vorteile dieses neuen Gehäuses hervorhebt, das alle erforderlichen Hardwarekomponenten für die Entwicklung von Roboterprogrammen integriert.
Dieses Kit bietet eine betriebsbereite Computing-Lösung, die entwickelt wurde, um Montagezeit zu sparen:
- Mechanisch: Integration von Komponenten auf der mobilen Basis
- Elektronisch: Verbindung aller Geräte untereinander
- Software: Installation von ROS-Paketen für die Komponenten
Die von GR Lab verwendeten Komponenten:
- Ein leistungsstarker PC für die fortgeschrittene Algorithmenentwicklung
- Eine IMU (Inertialmesseinheit)
- Eine Tiefenkamera
- 3D LiDAR
- RTK (Real Time Kinematic) kompatibles GPS
- Ein 4G-Modem (oder optional 5G)
Die Komponenten können entsprechend den Vorlieben oder Bedürfnissen des Kunden angepasst werden.
Software-Kenntnisse: OS-Installation, ROS und VNC
Im Rahmen unserer Projekte im Ingenieurbüro GR Lab spielen wir eine entscheidende Rolle in der Entwicklung des Kits, indem wir das Betriebssystem (OS) auf den PCs über Linux Ubuntu installieren. Dieser Prozess umfasst die Integration von ROS (Robot Operating System) und verschiedener Pakete mit wesentlichen Komponenten für eine ordnungsgemäße Funktionalität. Parallel zu ROS setzen wir noch ein wichtiges Werkzeug ein, VNC (Virtual Network Computing), das die Möglichkeit bietet, sich über eine dedizierte Seite mit dem Desktop des im Roboter befindlichen Computers zu verbinden. Dies erleichtert die Überwachung des Computerstatus und den Empfang von Informationen von den Sensoren im Entwicklungsgehäuse erheblich.
Das Ziel ist einfach: Sobald Sie Ihren mobilen Roboter mit der Gehäuse erwerben, können Sie sofort mit dem Entwicklung Ihrer Programme beginnen und dabei auf den Aufbau eines eigenen Informationssystems verzichten.
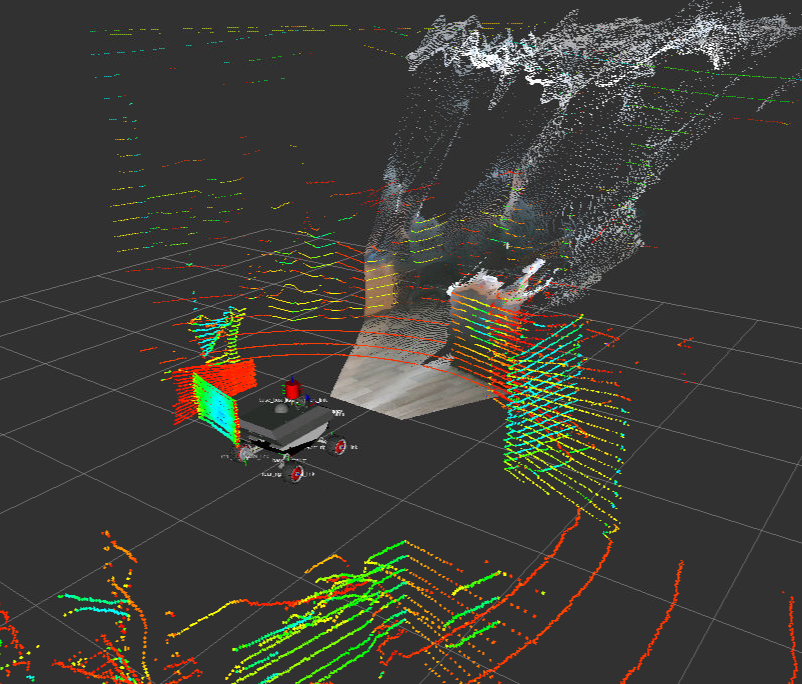
Eine Ansicht, die Sensorrückmeldungen mit dem 3D-Modell (URDF) des Roboters in der Mitte zeigt. Diese Ansicht ist über ROS durch das von GR Lab entwickelte Paket zugänglich.
Ein typisches Beispiel: Fraunhofer IIS
GR Lab hat ein benutzerdefiniertes ROS-Paket für die in Deutschland ansässige Fraunhofer University entwickelt. Für dieses Projekt hat das IIS SCOUT MINI und HUNTER 2.0 als mobile Roboter ausgewählt, denen wir ein spezifisches Gehäuse hinzugefügt haben, das die vom Kunden benötigten Sensoren integriert. Das Ziel des Instituts ist es, diese mobilen Roboter in studentischen Projekten einzusetzen, wie z. B. bei der Entwicklung von Navigationsalgorithmen unter Verwendung der im Gehäuse installierten Sensoren.
GR Lab hat sich dafür entschieden, die folgenden Komponenten zu verwenden, um den Bedürfnissen der Kunden bestmöglich gerecht zu werden:
- Ein leistungsstarker PC für die fortgeschrittene Algorithmenentwicklung
- Eine IMU (Inertialmesseinheit)
- Die Tiefenkamera Realsense D435
- Der LiDAR 3D Helios 16P
- RTK (Real Time Kinematic) kompatibles GPS
- Ein 4G-Modem (oder optional 5G)