An R&D ROS kit created by the GR Lab specifically for the mobile robots from AgileX Robotics.
The GR Lab (Génération Robots’ engineering department) designed and assembled a R&D kit compatible with the AgileX Roboticsmobile robots, and featuring all the hardware needed to develop robotic programs.
This kit offers a ready-to-develop IT solution, engineered to save time for the end-users:
Mechanical: Integration of components on the mobile base
Electrical: Connection of all equipment to each other
Software: Installation of ROS packages for the components
The components used by GR Lab:
A powerful PC designed for advanced algorithm development
An IMU (inertial measurement unit)
A depth camera
3D LiDAR
RTK (Real Time Kinematic) compatible GPS
A 4G modem (or optional 5G)
The components can be customized according to the preferences or needs of the customer.
In addition to electronic and mechanical integration, our engineers handled the software part, installing the OS on the PCs via Linux Ubuntu. This procedure includes the integration of ROS (Robot Operating System) and the different packages for key components.
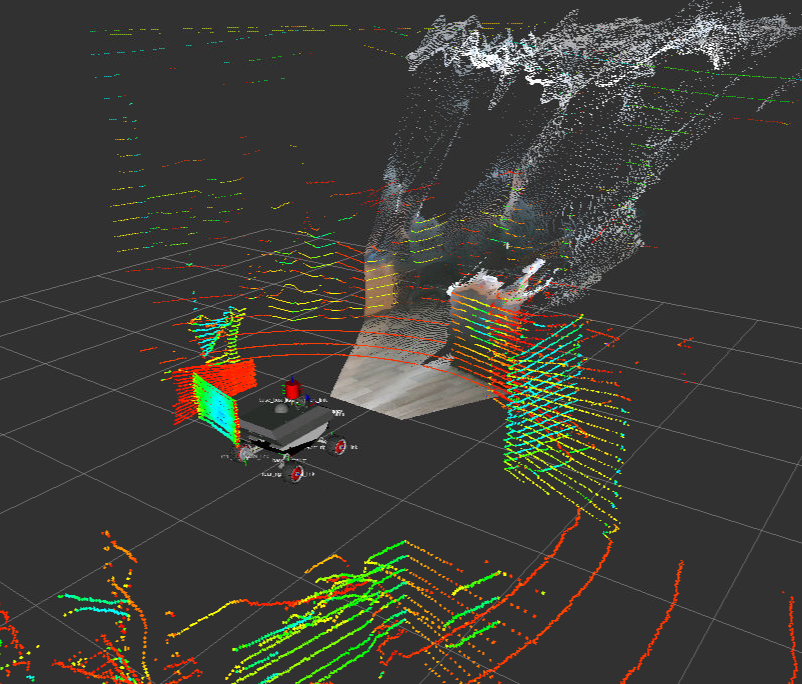
Alongside ROS, we also deploy an important tool called VNC (Virtual Network Computing), which offers a dedicated page for connecting to the on-board computer’s desktop. Thanks to this, it s possible to check the computer’s status at any time, as well as receiving feedback from the sensors built into the kit.
Our goal: as soon as our clients receive the mobile robot and its ROS R&D kit, they can immediately start developing their program and working on their application. The R&D kit eliminates the need to develop an entire smart system first.
A view displaying sensor data feedback with the 3D model (URDF) of the robot. This render is accessible with ROS through the package developed by GR Lab.
Use case: Fraunhofer Research Lab
GR Lab has developed a custom ROS package for the Fraunhofer University based in Germany. For this project, the university has chosen the SCOUT MINI and the HUNTER 2.0 as mobile robots, to which we added a custom R&D kit (with extra sensors required by the client). The university’s goal is to use these mobile robots in student projects such as developing navigation algorithms.
GR Lab has selected the following components to best meet the needs of the university:
A powerful PC designed for advanced algorithm development