Au cours des dernières années, les performances des robots quadrupèdes n’ont cessé d’évoluer, y compris sur des terrains difficiles. Les robots mobiles sont parfaitement adaptés aux missions d’inspection, mais nativement, ils ne sont pas faits pour les tâches intégrant de la préhension. Souvent, les ingénieurs travaillant avec les robots quadrupèdes vont ajouter des périphériques externes. Ceci permet de démultiplier le nombre de tâches capables d’être effectuées par ces types de robots. C’est ce que font les roboticiens de chez Unitree Robotics, un des leaders sur le marché dans la conception des robots chiens. Grâce à l’IA et aux nombreux capteurs disponibles sur le marché, il est désormais possible d’apprendre à un robot-chien à ramasser des objets et à appuyer sur des boutons mais aussi à effectuer des tâches encore plus complexes.
Une université américaine utilise la “politique unifiée” pour coordonner un bras manipulateur avec le robot Go1 d’Unitree Robotics
Un bras robotique peut augmenter considérablement le champ d’applications des robots quadrupèdes.
La méthode de base pour les quadrupèdes doté d’un bras robotique est de est de faire en sorte que le contrôleur gère séparément la marche et la préhension. Cette méthode n’est pas la plus optimale. Elle nécessite beaucoup de temps et d’efforts dans sa mise en place. De plus, le risque d’erreurs se propageant à travers les différents modules est élevé, ainsi que la probabilité d’avoir des mouvements saccadés.
Pour faire face à cette problématique, l’université Carnegie Mellon à Pittsburgh a décidé de mettre en place un apprentissage par renforcement, et de tester un système de politique unifiée permettant de contrôler le système entier (quadrupède + bras). Cette méthode permet d’obtenir des mouvements plus fluides, plus précis et une meilleure coordination bras/pattes.
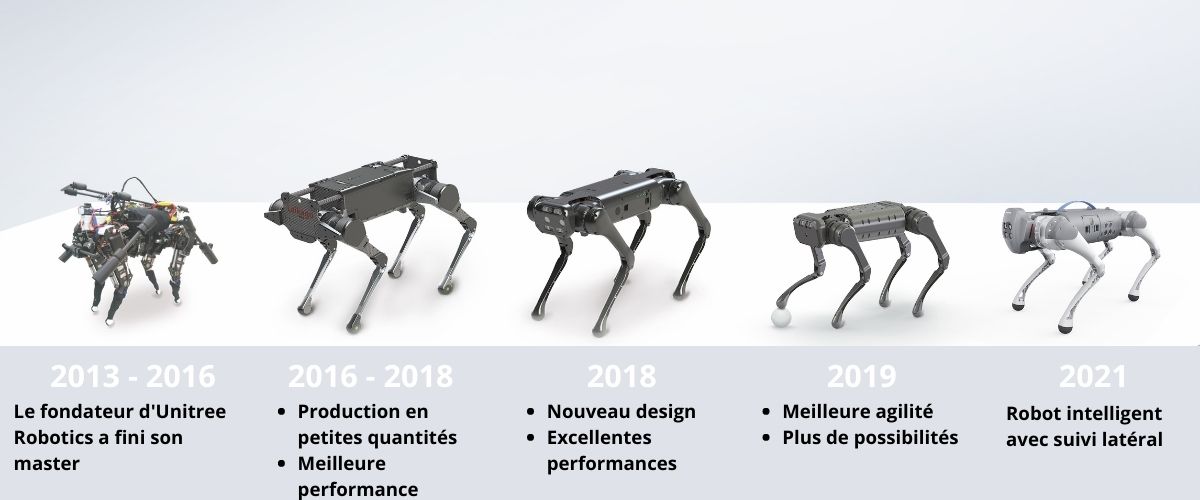
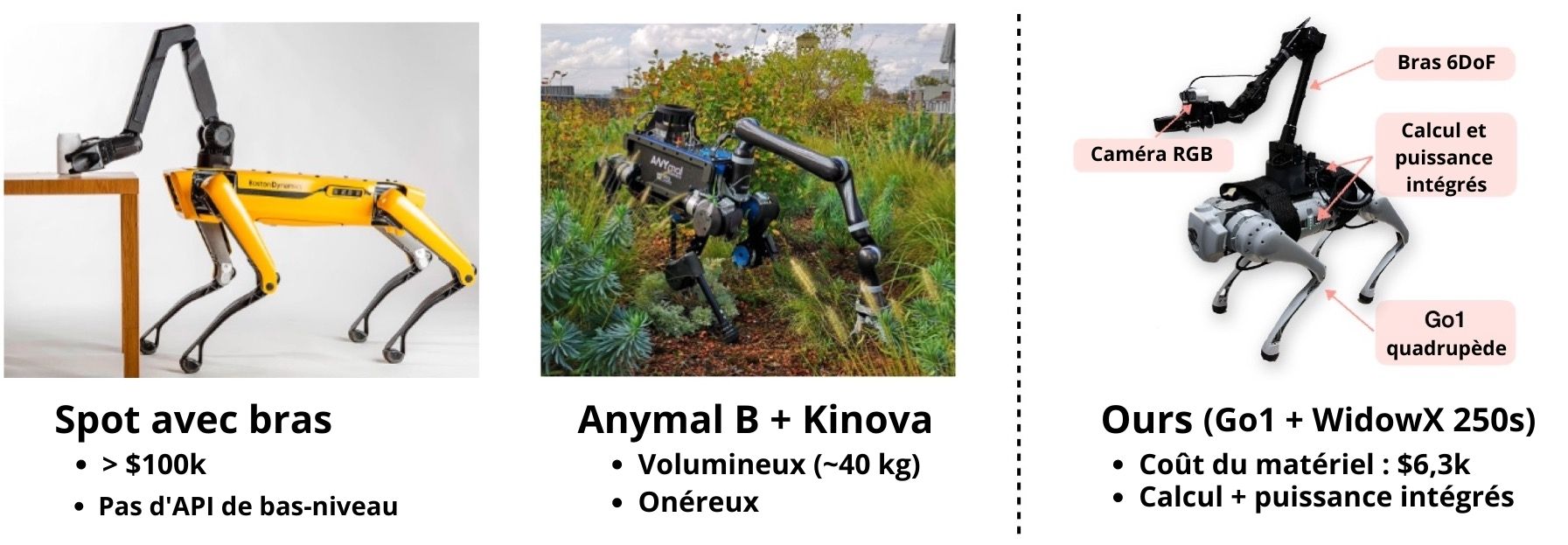
Dans ce projet mené par 2 étudiants et leur professeur, le robot utilisé est le Go1 de Unitree Robotics, réputé pour sa fiabilité et ses excellentes performances, pour un investissement peu élevé. Le bras monté sur le robot est le WidowX 250 (6 axes) de chez Trossen Robotics.
L’expérimentation a prouvé que le système de politique unifiée permet d’obtenir des comportements agiles et dynamiques dans plusieurs cas de figure.
La “politique unifiée” permet d’obtenir des comportements agiles et dynamiques du corps et du bras du robot
Comparatif
Les manipulateurs commerciaux, tels que Boston Dynamics Spot with Arm, représentent un gros investissement pour les universités ou les laboratoires de recherche. L’équipe du projet a trouvé une alternative moins onéreuse en choisissant les marques Unitree Robotics et Trossen Robotics, afin de concevoir leur propre plateforme autonome.
Téléopération
La politique unifiée permet de contrôler toutes les articulations (12DoF pour les pattes et 6DoF pour le bras) à 50 Hz en utilisant seulement une Raspberry Pi.
L’architecture logicielle du bras WidowX 250s est installé sur la NVIDIA Jetson du robot chien Go1 grâce aux packages officiels fournis par Trossen Robotics. Le protocole UDP est utilisé pour la communication entre la Raspberry Pi et la NVIDIA Jetson.
L’ouverture et la fermeture du gripper ne font pas partie de la politique unifiée, et sont contrôlées par un joystick pendant les différentes expérimentations de téléopération. Pendant les tests avec des comportements basés sur le suivi visuel, une politique scriptée est utilisée pour gérer le gripper.
Avec cette combinaison d’apprentissage par renforcement et de politique unifiée, la plateforme robotique peut fonctionner de manière totalement autonome dans 3 modes : téléopération, suivi visuel et répétition des démonstrations. Le robot peut ainsi :
- Placer un stylo dans un gobelet éloigné
- Ramasser un gobelet et le jeter dans une poubelle en hauteur
- Ramasser un objet sur un terrain difficile
- Appuyer sur un bouton pour entrer dans un bâtiment
Suivi visuel
Pour le suivi visuel, le robot est équipé d’une caméra de profondeur RealSense D435i de chez Intel.
Le robot est chargé de suivre un AprilTag, la politique unifiée ajuste automatiquement le contrôle de tout le corps pour suivre le AprilTag. Comme nous pouvons le constater, le robot plie ses pattes en coordination avec le bras, afin de garder la caméra près du AprilTag.
Répétition des démonstrations
Intéressé ?
Notre bureau d’études en ingénierie a la capacité de répondre à de très nombreuses problématiques innovantes, comme l’intégration d’un bras manipulateur sur un robot autonome ou semi-autonome. Nous avons récemment intégré des bras collaboratifs sur 4 robots mobiles omnidirectionnels : découvrir notre cas client.