Elektrische Motorkontroller
Die Motorcontroller sind elektronische Geräte, die die Bewegung von elektrischen Motoren steuern können. Sie werden häufig in Bereichen wie Robotik, industrieller Automatisierung und Elektrofahrzeugen eingesetzt.
Roboteq: modernste Technologie für optimale Leistung
Die Roboteq Motorcontroller sind sehr vielseitige und robuste Motorcontroller. Sie bieten fortgeschrittene Funktionen wie Geschwindigkeitsregelung, Positionsregelung, Drehmomentsteuerung, Energie-Regeneration und Überwachung von Leistungsparametern. Die Roboteq Controller sind auch mit einer breiten Palette von Motortypen kompatibel, einschließlich Gleichstrommotoren (DC), Wechselstrommotoren (AC) und Schrittmotoren.
Sabertooth: eine kosteneffektive Lösung für Roboter- und Automatisierungsprojekte
Die Sabertooth-Controller sind auch beliebte und vielseitige Motorcontroller. Sie sind für den Betrieb mit Gleichstrommotoren (DC) ausgelegt und bieten eine breite Palette von Funktionen, darunter Geschwindigkeitsregelung, Richtungsregelung und Schutz vor Überspannung und Kurzschlüssen. Die Sabertooth-Controller sind auch für ihre Benutzerfreundlichkeit und Zuverlässigkeit bekannt und werden häufig in Roboter- und Automatisierungsprojekten eingesetzt.

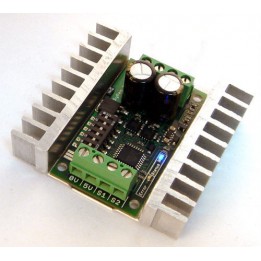







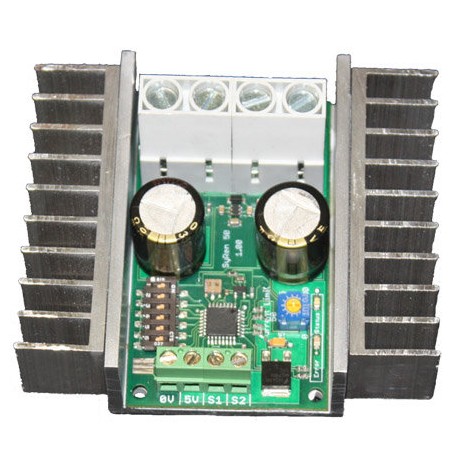
Testen Sie die Leistung des Motorcontrollers SyRen 50: Bis 100 Ampere Leistungsspitze, 4 Steuermodi für Geschwindigkeit oder Richtung, das Ganze perfekt abgesichert.
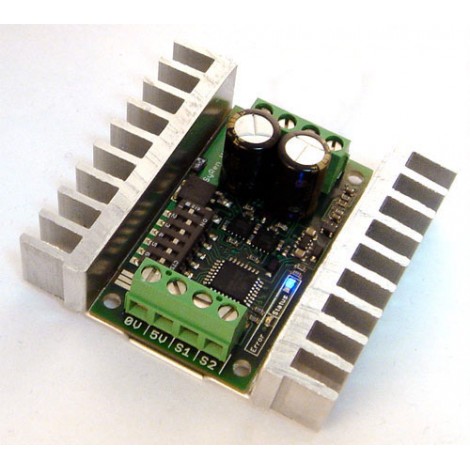
Der berühmte regenerative Motorcontroller SyRen wird hier in der Version 25 A angeboten: Er ist komplett gesichert und sehr vielseitig und ermöglicht eine erweiterte Bewegungssteuerung Ihres mobilen Roboters.
Vertrauen Sie Ihrem Sabertooth die Steuerung und Stromversorgung von zwei Gleichstrommotoren, einem Mikrocontroller, mehreren Servos usw. an. Damit erstürmt Ihr Roboter neue Gipfel in Sachen Handling und Autonomie!
Der Motorcontroller Sabertooth 2x5 kann zwei Bürstenmotoren mit 5 Ampere Gleichstrom versorgen. Die ideale Lösung für Ihre kleinen Roboter!

Sabertooth meldet sich mit seinem ambitioniertesten Motorcontroller zurück: 2 x 60 A zur Steuerung von Robotern bis 450 kg mit der größten Finesse!

Präzise Navigation, erhöhte Autonomie, verschiedenste Steuermodi: Der SyRen Motorcontroller zählt zu den hervorragenden Treibern für Roboter mittlerer Größe.
Wenn Sie mehr Freiheit und Präzision bei der Steuerung Ihrer Motoren und Servos suchen, dann bietet der Motion Controller Kangaroo von Dimension Engineering sämtliche gewünschten Vorzüge. Er ist kompatibel mit Sabertooth und SyRen und bietet Ihnen die Möglichkeit, die Position und/oder Geschwindigkeit ohne Entgleisungen im Griff zu haben.

Sabertooth 2x32 bietet einen zweikanaligen Motorcontroller mit 32 A (64 A Spitze pro Motor), steuerbar über einen ferngesteuerten Eingang, eine serielle TTL-Kommunikation, USB- oder Analog-Eingang. Der regenerative Controller ist ein echter Booster für Ihren Roboter!


Exklusiv bei Generation Robots gibt es jetzt das Pixl-Board, entwickelt zur Steuerung des Motors Dynamixel XL-320 Ihres Lernroboters Poppy Ergo Jr und für die Stromversorgung Ihrer Raspberry Pi-Platine. Nicht kompatibel mit Raspberry Pi 3B+.