Ressourcen für den programmierbaren humanoiden Roboter NAO6
FAQ – Humanoider Roboter NAO V6
Wofür wird der humanoide Roboter NAO V6 verwendet?
Der humanoide Roboter NAO V6 wird für den Robotikunterricht, die Forschung im Bereich künstliche Intelligenz und für Projekte der Mensch-Roboter-Interaktion verwendet. Er ermöglicht die Entwicklung interaktiver Szenarien, autonomer Verhaltensweisen und pädagogischer Anwendungen.
Ist der Roboter NAO V6 für den Unterricht geeignet?
Ja, NAO wird häufig an Universitäten, Ingenieurhochschulen und STEM-Einrichtungen eingesetzt. Er ermöglicht das Erlernen von Programmierung, Robotik und KI durch konkrete und interaktive Projekte.
Wie programmiert man den Roboter NAO V6?
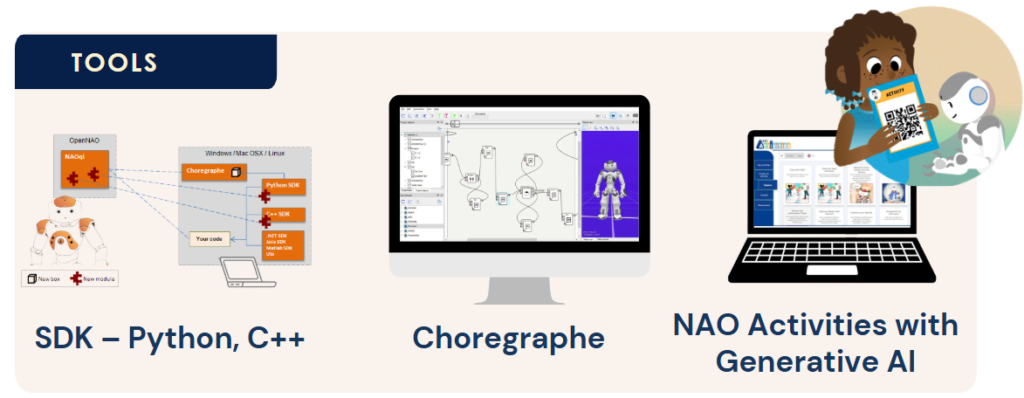
Der Roboter kann mit mehreren Werkzeugen programmiert werden:
- Choregraphe für visuelle Programmierung
- Python für schnelle Entwicklung
- C++ für fortgeschrittene Projekte
Es ist auch möglich, fertige Szenarien über NAO Activities zu verwenden.
Welche Arten von Projekten kann man mit NAO umsetzen?
Mit NAO können viele Projekte entwickelt werden:
- Mensch-Roboter-Interaktion
- Spracherkennung und Vision
- Robotik-Demonstrationen
- Pädagogische Projekte
- Forschung in sozialer Robotik und KI
Ist der Roboter NAO V6 autonom?
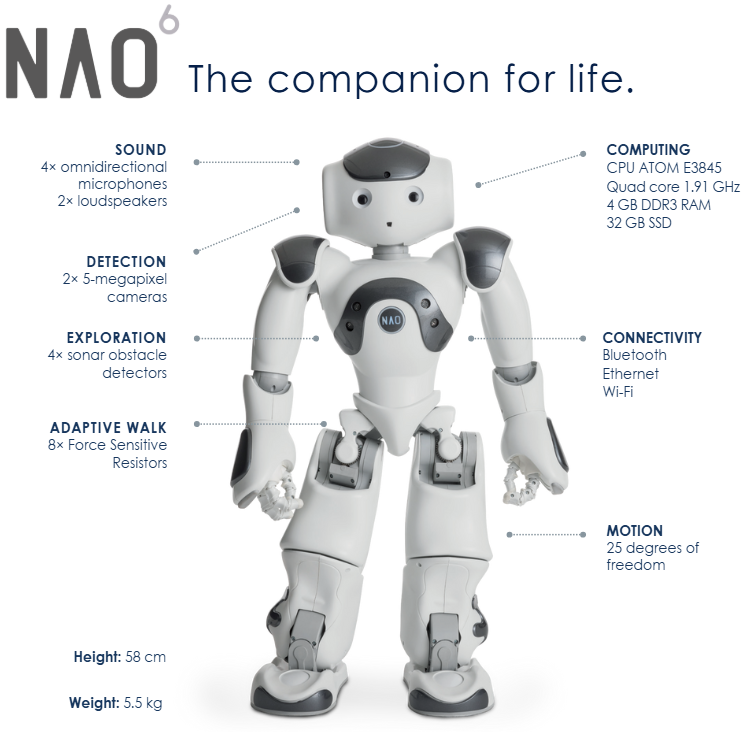
Ja, der NAO V6 ist ein autonomer Roboter, ausgestattet mit Sensoren, Kameras und einem eingebetteten System, das ihm erlaubt, seine Umgebung wahrzunehmen und ohne ständige Steuerung mit Benutzern zu interagieren.
Wie lange ist die Akkulaufzeit des Roboters NAO V6?
Der Roboter verfügt je nach Nutzung (Interaktion, Bewegung, Verarbeitung) über eine Akkulaufzeit von etwa 60 bis 90 Minuten.
Ist der Roboter NAO V6 für KI-Forschung geeignet?
Ja, NAO ist eine weit verbreitete Plattform für die Forschung in künstlicher Intelligenz, sozialer Robotik und Wahrnehmung. Er ermöglicht das Testen von Algorithmen und Interaktionen in realen Umgebungen.
Kann NAO für Demonstrationen oder Empfang eingesetzt werden?
Ja, der Roboter NAO wird häufig für Demonstrationen, Veranstaltungen, Besuchsempfang oder Mediation eingesetzt. Er kann sprechen, interagieren und Benutzer in verschiedenen Kontexten führen.
Ist der Roboter NAO V6 leicht zu transportieren?
Ja, mit einem Gewicht von 5,6 kg und einer Höhe von 58 cm lässt sich NAO leicht zwischen verschiedenen Räumen oder Standorten transportieren.
Was enthält das NAO V6 Kit?
Das Kit enthält:
- Den humanoiden Roboter NAO V6
- Die Software-Suite (Choregraphe, SDK, Werkzeuge)
- Eine 2-jährige Garantie