Resources for the programmable humanoid robot NAO6
FAQ – NAO V6 humanoid robot
What is the NAO V6 humanoid robot used for?
The NAO V6 humanoid robot is used for teaching robotics, artificial intelligence research, and human-robot interaction projects. It enables the development of interactive scenarios, autonomous behaviors, and educational applications.
Is the NAO V6 robot suitable for education?
Yes, NAO is widely used in universities, engineering schools, and STEM institutions. It helps teach programming, robotics, and AI through concrete and interactive projects.
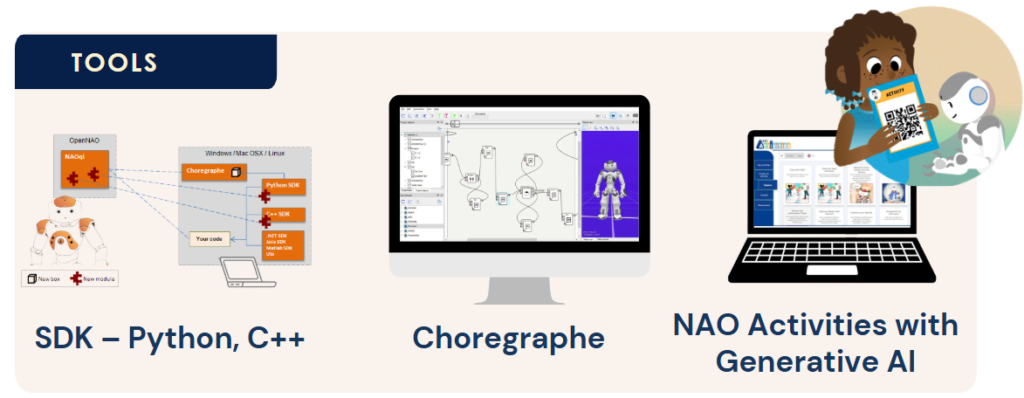
How do you program the NAO V6 robot?
The robot can be programmed using several tools:
- Choregraphe for visual programming
- Python for rapid development
- C++ for advanced projects
It is also possible to use ready-made scenarios via NAO Activities.
What types of projects can be developed with NAO?
NAO makes it possible to develop many types of projects:
- Human-robot interaction
- Voice recognition and vision
- Robotics demonstrations
- Educational projects
- Research in social robotics and AI
Is the NAO V6 robot autonomous?
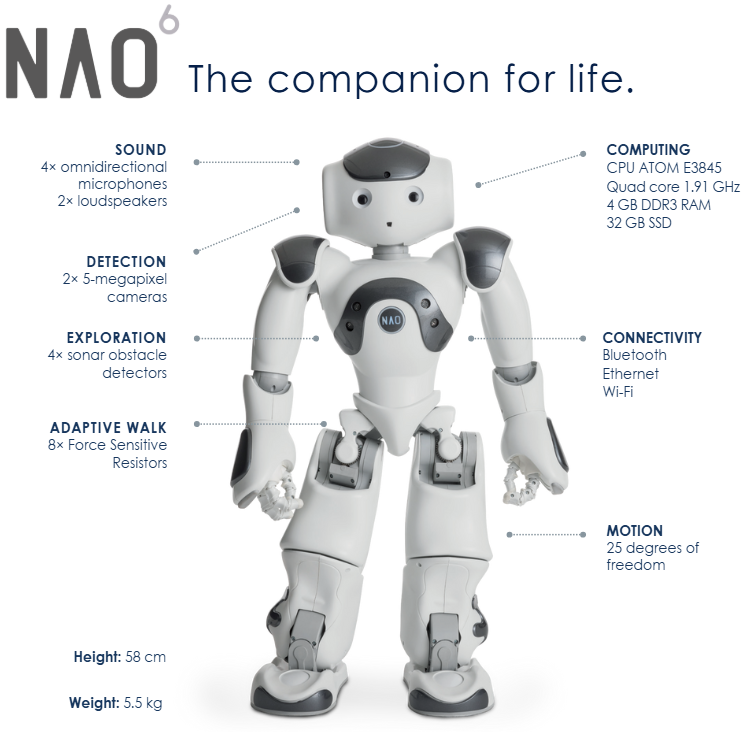
Yes, the NAO V6 is an autonomous robot equipped with sensors, cameras, and an embedded system that allows it to perceive its environment and interact with users without constant control.
What is the battery life of the NAO V6 robot?
The robot has a battery life of approximately 60 to 90 minutes depending on usage (interaction, movement, processing).
Is the NAO V6 robot suitable for AI research?
Yes, NAO is a widely used platform for research in artificial intelligence, social robotics, and perception. It allows algorithms and interactions to be tested in real environments.
Can NAO be used for demonstrations or reception purposes?
Yes, the NAO robot is often used for demonstrations, events, visitor reception, or mediation. It can speak, interact, and guide users in different contexts.
Is the NAO V6 robot easy to transport?
Yes, with a weight of 5.6 kg and a height of 58 cm, NAO is easy to transport between different rooms or sites.
What is included in the NAO V6 kit?
The kit includes:
- The NAO V6 humanoid robot
- The software suite (Choregraphe, SDK, tools)
- A 2-year warranty