Der Ouster OS1 Max REV8 LiDAR eignet sich für Projekte, bei denen große Reichweite, hohe Auflösung und umfangreiche Datenausgabe gefragt sind. Er passt zu Systemen, die ihre Umgebung mit ausreichend Detail für die Wahrnehmung erfassen müssen und dabei eine nützliche Reichweite für weiter entfernte Erkennung behalten sollen.
- Mobile Robotik: Navigation, Hindernisvermeidung, Lokalisierung und eingebettete Wahrnehmung.
- Autonome Fahrzeuge: Objekterkennung, Szenenverständnis und Langstreckenwahrnehmung.
- Lkw, Busse und Off-Highway-Fahrzeuge: robuste Wahrnehmung für anspruchsvolle Umgebungen.
- Verkehrs- und Sicherheitsüberwachung: Szenenanalyse, Zonenverfolgung und Erkennung auf Distanz.
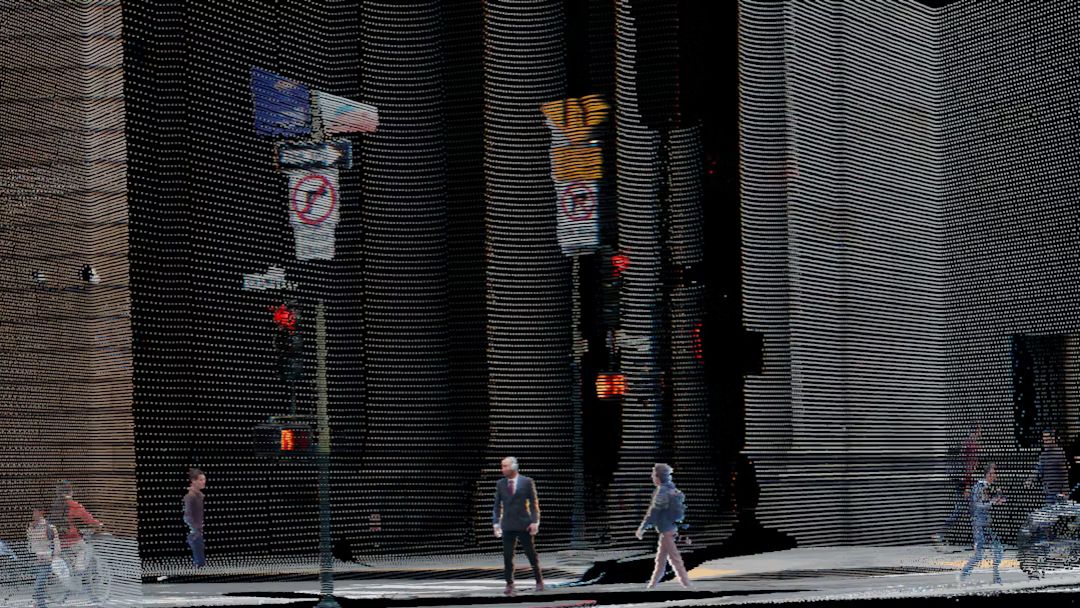
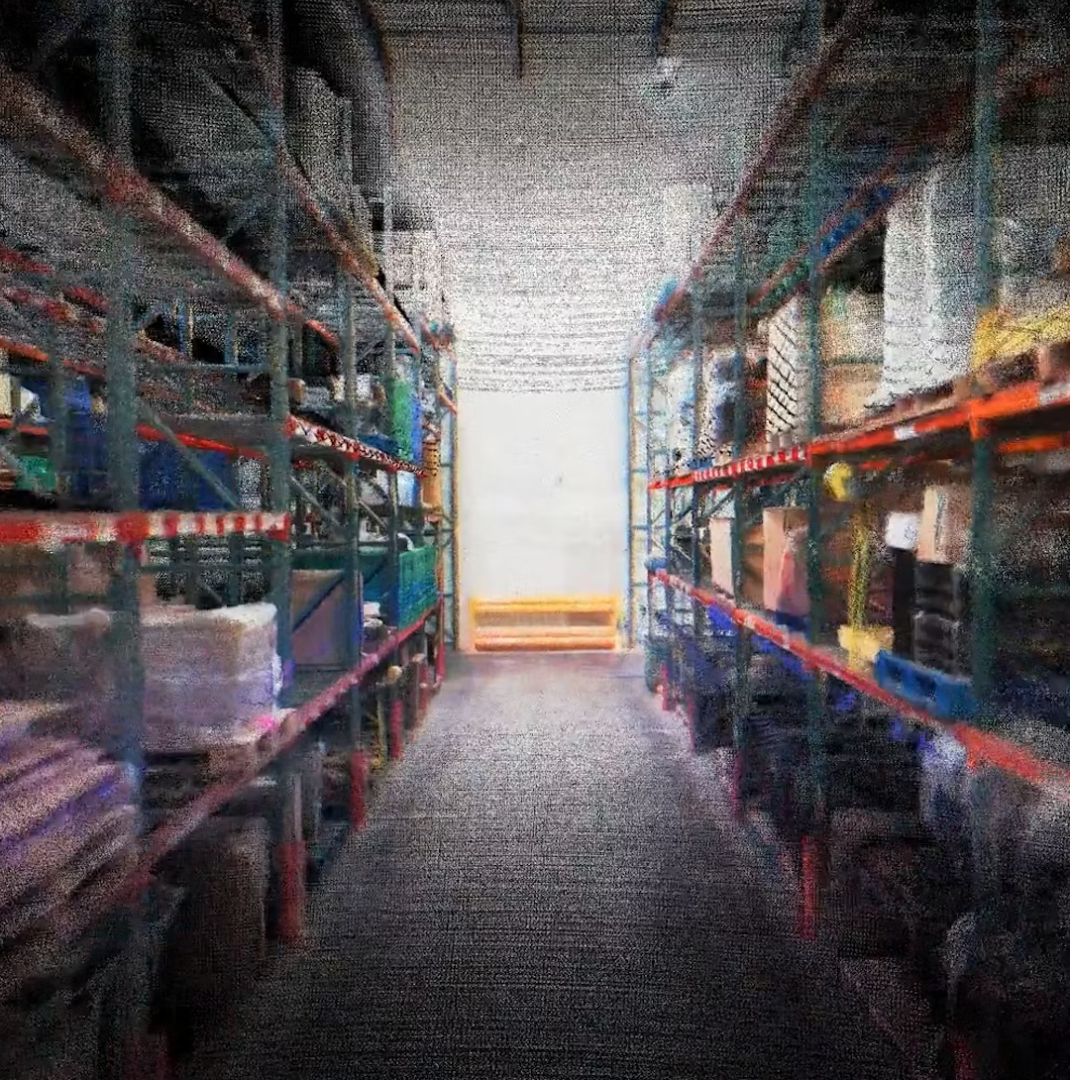
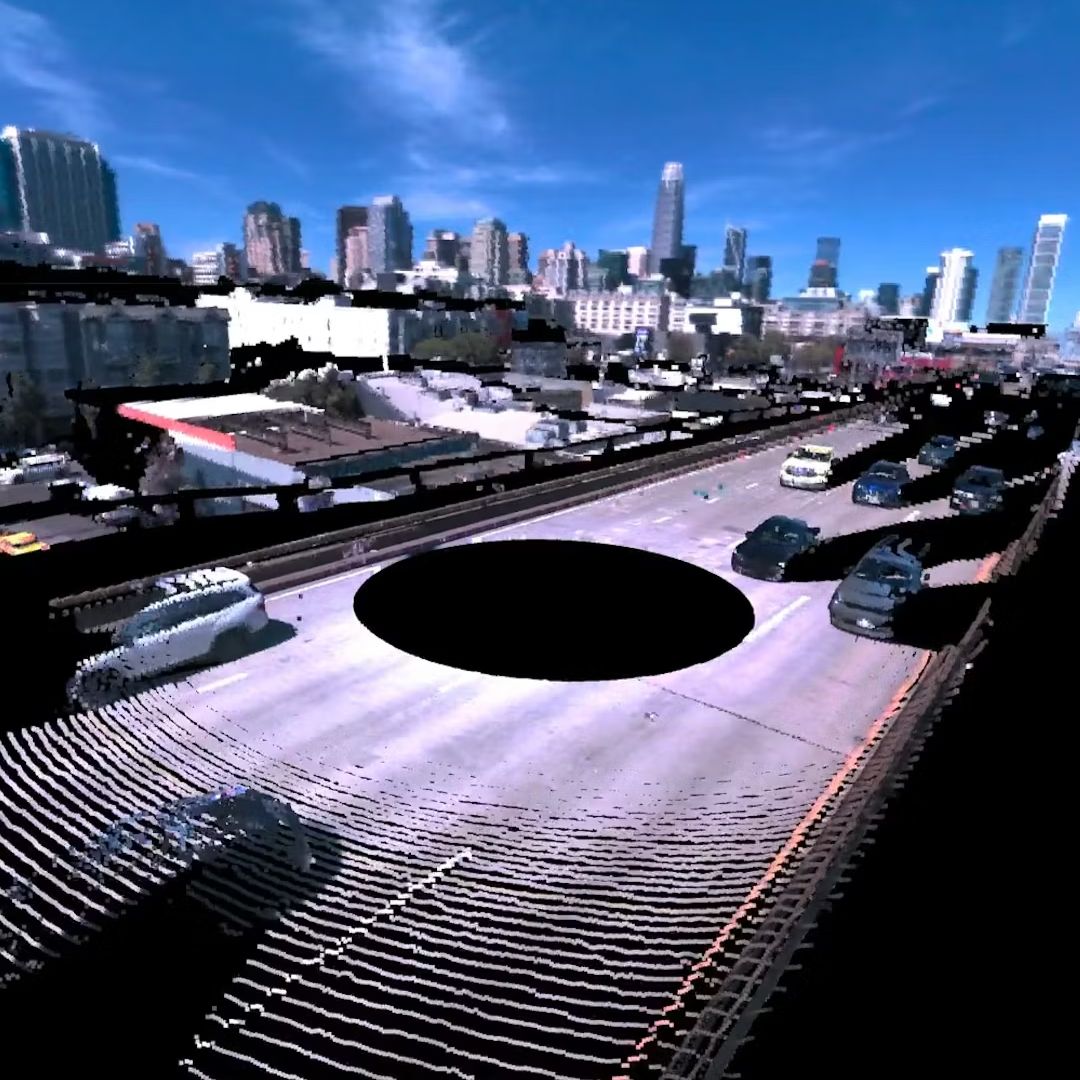
- 3D-Kartierung: Erfassung dichter Punktwolken mit nativen Farbdaten.
- Forschung und Entwicklung: Integration in Workflows mit ROS 2, ROS, MATLAB, NVIDIA Driveworks, NVIDIA Isaac und Isaac Sim.
Im Integrationskontext verfügt der OS1 Max REV8 über eine UDP-Ausgabe über Gigabit-Ethernet, eine HTTPS-API zur Steuerung sowie Funktionen wie integrierter 3D Zone Monitor, Multi-Sensor Phase Lock, Azimut-Masking, Anpassung der Mindestdistanz, Return Ordering und einen Low-Power-Standby-Modus. Er kann somit als Arbeitsbasis für Projekte in den Bereichen Navigation, Zonenüberwachung, Sensordatenfusion oder Robot Vision dienen.
Technische Spezifikationen des Ouster OS1 Max REV8 LiDAR
| Reichweite bei 10 % Reflektivität | 200 m |
| Reichweite bei 80 % Reflektivität | 350 m |
| Maximal darstellbare Reichweite | 500 m |
| Mindestdistanz | 0,0 m (0,3 m optional, 0,5 m standardmäßig) |
| Horizontales Sichtfeld | 360,0° |
| Vertikales Sichtfeld | 43,9° (+21,95° bis -21,95°) |
| Vertikale Auflösung | 64, 128 oder 256 Kanäle |
| Horizontale Auflösung | 512, 1024, 2048 oder 4096 |
| Rotationsfrequenz | 5 bis 40 Hz |
| Anzahl der Echos | Bis zu 2 |
| Max. Punkte pro Sekunde | 10 485 760 pts/s |
| Daten pro Punkt | RGB, Distanz, Signal, Reflektivität, Nahinfrarot, Kanal, Azimutwinkel, Zeitstempel |
| Farbtiefe | 48 Bit insgesamt / 16 Bit pro Kanal |
| Dynamikbereich | 116 dB |
| Verbindung | UDP über Gigabit-Ethernet |
| IMU | 3-Achsen-Gyroskop + 3-Achsen-Beschleunigungsmesser |
| Steuerungsschnittstelle | HTTPS API |
| Leistungsaufnahme | 15 bis 25 W, 19 W nominal |
| Nennspannung | 12 VDC oder 24 VDC |
| Spannungsbereich | 9 V bis 58 V DC |
| Abmessungen | 87 mm Durchmesser; Höhe 82 mm ohne Kappe / 87 mm mit Thermokappe |
| Gewicht | 670 g ohne Halo-Cap / 720 g mit Halo-Cap |
| Betriebstemperatur | -40 °C bis +85 °C |
| Schutzart | IP68 / IP69K |
| Stoßfestigkeit | 100 G |
| Vibrationsfestigkeit | 10 Grms |
| Kompatible Software | Ouster Python SDK, C++ Driver, Ouster Studio |
| Drittanbieter-Integrationen | ROS2, ROS, NVIDIA Driveworks, MATLAB, NVIDIA Isaac, NVIDIA IsaacSim |
Ressourcen des Ouster OS1 Max REV8 LiDAR
FAQ zum Ouster OS1 Max REV8 LiDAR
Wofür wird der Ouster OS1 Max REV8 LiDAR verwendet?
Der OS1 Max REV8 dient der eingebetteten 3D-Wahrnehmung in Projekten der mobilen Robotik, autonomen Fahrzeuge, Kartierung, Verkehrs- und Sicherheitsüberwachung, langreichweitigen Industrieanwendungen und Off-Highway-Fahrzeugen.
Wie groß ist die Reichweite des Ouster OS1 Max REV8?
Der Sensor bietet eine Reichweite von 200 m auf ein Ziel mit 10 % Reflektivität und eine Reichweite von 350 m auf ein Ziel mit 80 % Reflektivität, mit einer maximal darstellbaren Reichweite von 500 m.
Wie groß ist das Sichtfeld des Ouster OS1 Max REV8?
Der OS1 Max REV8 verfügt über ein horizontales Sichtfeld von 360° und ein vertikales Sichtfeld von 43,9°, wodurch er sich für Langstreckenanwendungen eignet, die nutzbare Reichweite, Auflösung und konsistente Abdeckung erfordern.
Liefert der Ouster OS1 Max REV8 eine Farbpunktwolke?
Ja, der Sensor unterstützt eine native RGB-D-Farbpunktwolke, nützlich für fortgeschrittene Workflows in den Bereichen Wahrnehmung, Sensordatenfusion und Szenenanalyse.
Ist der Ouster OS1 Max REV8 mit ROS 2 kompatibel?
Ja, der OS1 Max REV8 ist kompatibel mit ROS 2, ROS, MATLAB, NVIDIA Driveworks, NVIDIA Isaac und Isaac Sim.
 mit großer Reichweite")
 mit großer Reichweite")

 mit großer Reichweite")