Il LiDAR Ouster OS1 Max REV8 è adatto a progetti in cui si cerca di combinare lunga portata, alta risoluzione e output dati ricco. È adatto a sistemi che devono osservare l’ambiente con sufficiente dettaglio per la percezione, mantenendo al tempo stesso una portata utile per il rilevamento più distante.
- Robotica mobile: navigazione, evitamento ostacoli, localizzazione e percezione onboard.
- Veicoli autonomi: rilevamento oggetti, comprensione della scena e percezione a lunga portata.
- Camion, autobus e veicoli off-highway: percezione robusta per ambienti esigenti.
- Monitoraggio del traffico e della sicurezza: analisi della scena, tracciamento di zone e rilevamento a distanza.
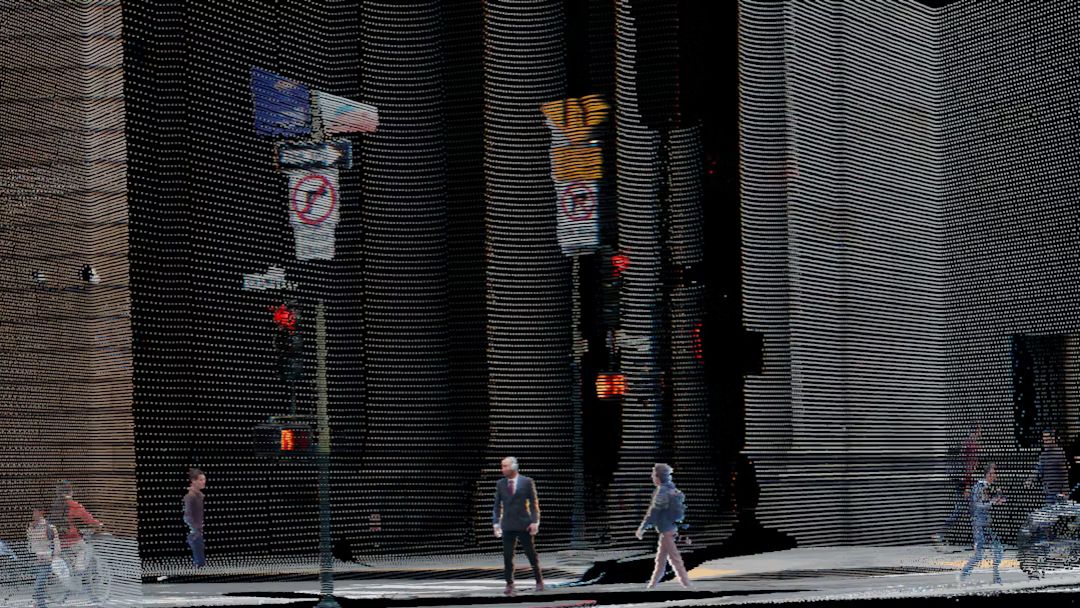
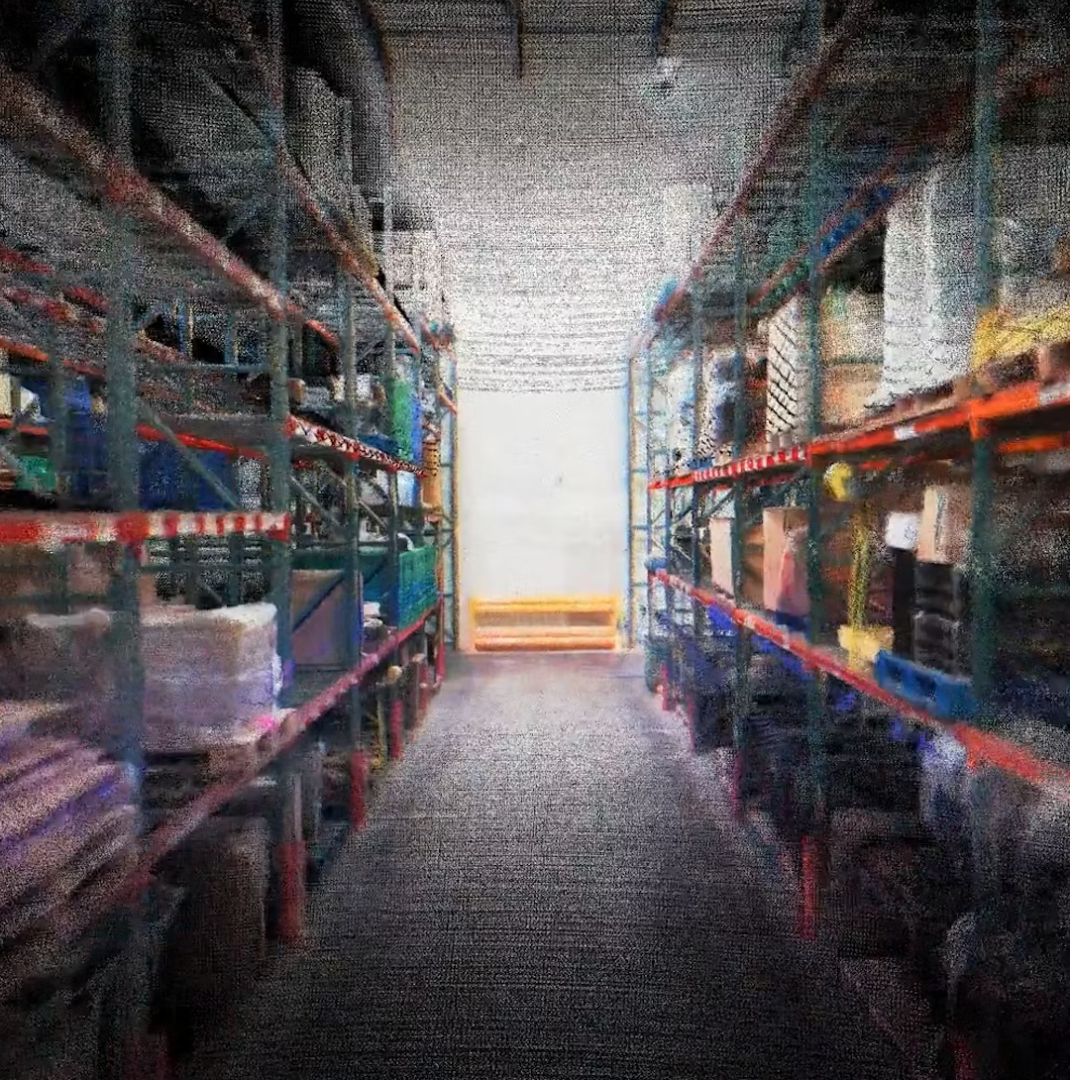
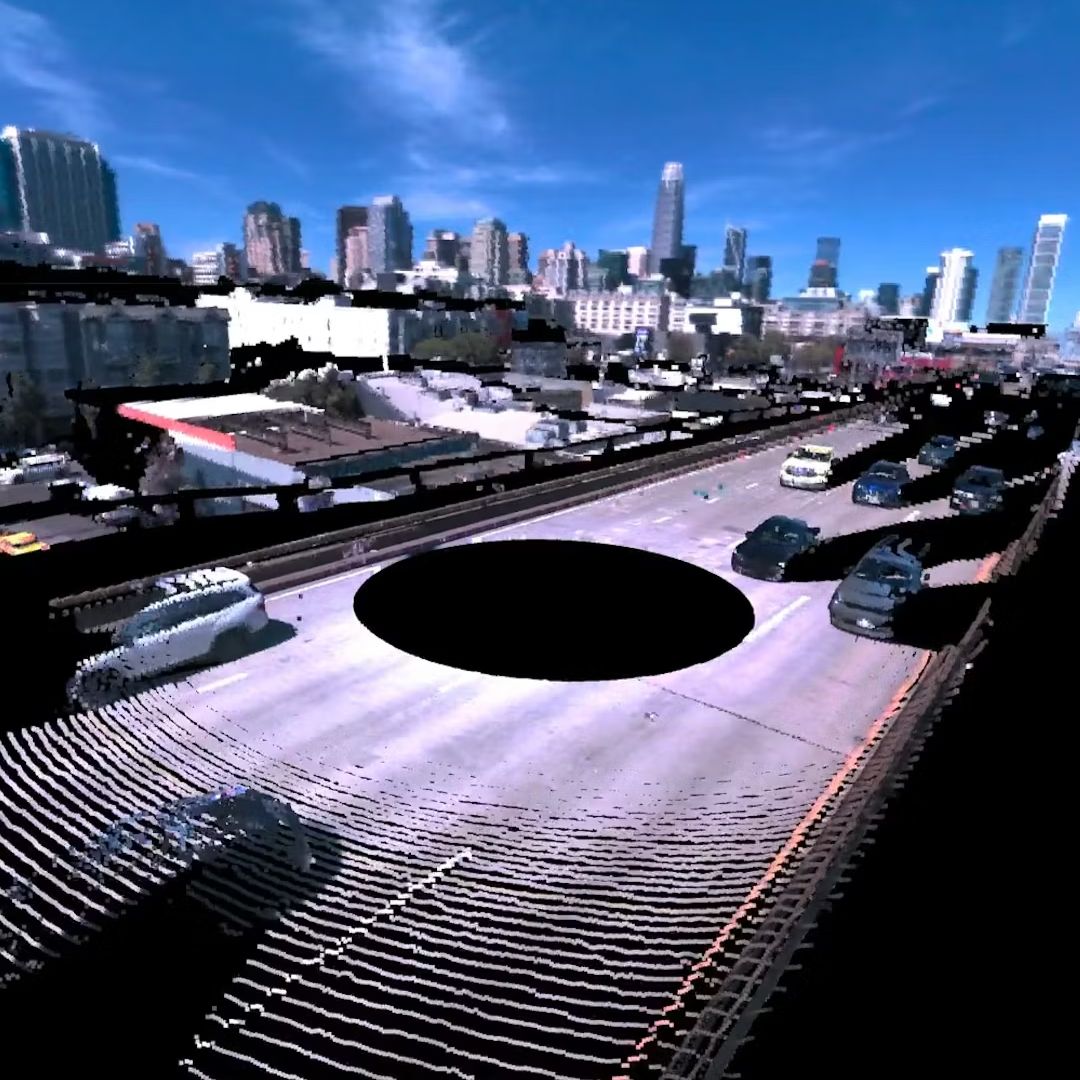
- Mappatura 3D: acquisizione di nuvole di punti dense con dati colore nativi.
- Ricerca e sviluppo: integrazione in workflow con ROS 2, ROS, MATLAB, NVIDIA Driveworks, NVIDIA Isaac e Isaac Sim.
In un contesto di integrazione, l’OS1 Max REV8 dispone di un’uscita UDP su Ethernet gigabit, di un’interfaccia di controllo HTTPS API e di funzioni come il 3D Zone Monitor onboard, il phase lock multi-sensore, il mascheramento azimutale, la regolazione della distanza minima, il return ordering e una modalità low-power standby. Può quindi servire come base di lavoro per progetti di navigazione, monitoraggio di zona, fusione di sensori o visione robotica.
Specifiche tecniche del LiDAR Ouster OS1 Max REV8
| Portata con riflettività al 10% | 200 m |
| Portata con riflettività all’80% | 350 m |
| Portata massima rappresentabile | 500 m |
| Distanza minima | 0,0 m (0,3 m opzionale, 0,5 m predefinita) |
| Campo visivo orizzontale | 360,0° |
| Campo visivo verticale | 43,9° (+21,95° a -21,95°) |
| Risoluzione verticale | 64, 128 o 256 canali |
| Risoluzione orizzontale | 512, 1024, 2048 o 4096 |
| Frequenza di rotazione | da 5 a 40 Hz |
| Numero di ritorni | Fino a 2 |
| Punti al secondo max. | 10 485 760 pts/s |
| Dati per punto | RGB, distanza, segnale, riflettività, vicino infrarosso, canale, angolo azimutale, timestamp |
| Profondità colore | 48 bit totali / 16 bit per canale |
| Gamma dinamica | 116 dB |
| Connessione | UDP su Ethernet gigabit |
| IMU | Giroscopio a 3 assi + accelerometro a 3 assi |
| Interfaccia di controllo | HTTPS API |
| Consumo | da 15 a 25 W, 19 W nominali |
| Tensione nominale | 12 VDC o 24 VDC |
| Intervallo di tensione | da 9 V a 58 V DC |
| Dimensioni | 87 mm di diametro; altezza 82 mm senza cappuccio / 87 mm con cappuccio termico |
| Peso | 670 g senza halo cap / 720 g con halo cap |
| Temperatura di funzionamento | da -40 °C a +85 °C |
| Grado di protezione | IP68 / IP69K |
| Resistenza agli urti | 100 G |
| Resistenza alle vibrazioni | 10 Grms |
| Software compatibili | Ouster Python SDK, C++ Driver, Ouster Studio |
| Integrazioni di terze parti | ROS2, ROS, NVIDIA Driveworks, MATLAB, NVIDIA Isaac, NVIDIA IsaacSim |
Risorse del LiDAR Ouster OS1 Max REV8
FAQ sul LiDAR Ouster OS1 Max REV8
A cosa serve il LiDAR Ouster OS1 Max REV8?
L’OS1 Max REV8 serve per la percezione 3D embedded in progetti di robotica mobile, veicoli autonomi, mappatura, monitoraggio del traffico e della sicurezza, applicazioni industriali a lunga portata e veicoli off-highway.
Qual è la portata dell’Ouster OS1 Max REV8?
Il sensore offre una portata di 200 m su un target con riflettività del 10% e una portata di 350 m su un target con riflettività dell’80%, con una portata massima rappresentabile di 500 m.
Qual è il campo visivo dell’Ouster OS1 Max REV8?
L’OS1 Max REV8 dispone di un campo visivo orizzontale di 360° e di un campo visivo verticale di 43,9°, il che lo rende adatto a usi a lunga portata che richiedono portata utile, risoluzione e copertura coerente.
L’Ouster OS1 Max REV8 fornisce una nuvola di punti a colori?
Sì, il sensore supporta una nuvola di punti a colori RGB-D nativa, utile per workflow avanzati di percezione, fusione di sensori e analisi della scena.
L’Ouster OS1 Max REV8 è compatibile con ROS 2?
Sì, l’OS1 Max REV8 è compatibile con ROS 2, ROS, MATLAB, NVIDIA Driveworks, NVIDIA Isaac e Isaac Sim.
 a lungo raggio")
 a lungo raggio")

 a lungo raggio")