Scoprite i servomotori Dynamixel-P

I servomotori digitali Dynamixel sono delle superstar nel mondo della robotica. Questi servomotori sono utilizzati dalla stragrande maggioranza dei robot costruiti nei laboratori di tutto il mondo. I servomotori Dynamixel sono facili da usare, potenti, precisi e, soprattutto, offrono un'ampia gamma di funzioni. Inoltre, questi servomotori possono essere programmati in un'ampia gamma di linguaggi di programmazione (C#, Java, Python, Labview, Matlab, ecc.).
I servomotori Dynamixel si dividono in 3 famiglie principali, che sono incompatibili (o difficilmente intercambiabili):
- Servomotori XL-320, un mini-servomotore a bassa potenza utilizzato sul robot Darwin Mini.
- Servomotori della gamma AX o MX. Condividono lo stesso protocollo di comunicazione e sono spesso presenti sullo stesso robot (Darwin-OP, Poppy, ecc.). Sono i servomotori più utilizzati. Dall'
- AX-12A all'MX-106, è disponibile un'intera gamma di servomotori, a seconda della velocità o della coppia.
- Infine, ci sono i servomotori Dynamixel-P, che offrono prestazioni professionali .
Servomotori Dynamixel-P
I servomotori Dynamixel-P sono una soluzione per i robot di dimensioni umane, siano essi robot mobili, bracci manipolatori o umanoidi. I servomotori Dynamixel-P sono più precisi e veloci dei tradizionali servomotori Dynamixel della gamma MX.
Come mostrato nell'immagine seguente, un servomotore Dynamixel-P è una combinazione di motore, sistema di riduzione e controllore. Come i servomotori Dynamixel classici, sono facili da collegare e programmare.
I servomotori Dynamixel-P offrono un controllo di velocità, posizione e coppia che li distingue da molti altri servomotori.
Infine, come la gamma MX di servomotori Dynamixel, i Dynamixel-P possono essere collegati tra loro in una catena a margherita e programmati tramite la rete utilizzando un ID univoco per ciascun servo.
Di seguito il video ufficiale di presentazione della gamma Dynamixel-P:
Esempi di utilizzo dei servomotori Dynamixel-P
Il robot di esplorazione dell'Università di Bonn
Il laboratorio di sistemi intelligenti autonomi dell'Università di Bonn ha partecipato all'edizione 2015 della DLR SpaceBot Cup con un rover dotato di un braccio manipolatore realizzato con servomotori Dynamixel-P. Il video seguente mostra le capacità di esplorazione e manipolazione mobile del loro robot:
Per saperne di più: http: //www.ais.uni-bonn.de/nimbro/Centauro/
Il robot umanoide Thor-OP
Alcune università americane, tra cui il famoso laboratorio Romela (già autore del robot Darwin-OP), hanno unito le forze per partecipare alla Darpa Robotics Challenge. Hanno progettato un robot umanoide di dimensioni umane chiamato THOR-OP. Questo umanoide utilizza servomotori Dynamixel-P per l'intera parte superiore del corpo.

Per ulteriori informazioni: http: //www.thordrc.com/
I diversi servomotori Dynamixel-P
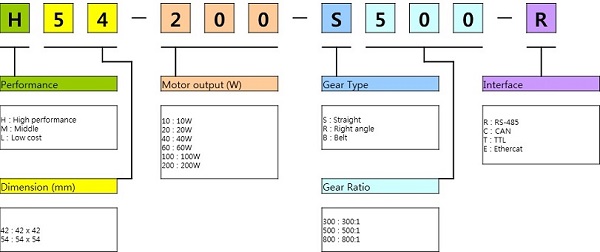
All'inizio del 2015, il produttore Robotis offriva poco più di 11 servomotori Dynamixel-P. I nomi dei servomotori sono in realtà una codifica che spiega il posizionamento del servomotore nella gamma, come spiega l'immagine seguente:
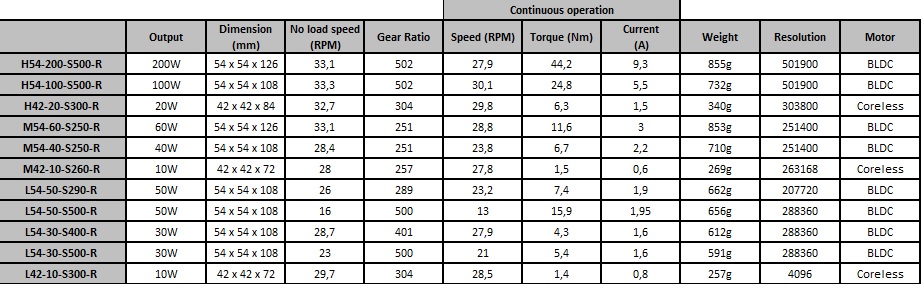
La tabella seguente mette a confronto le prestazioni dei vari servomotori Dynamixel-P:
Collegamento e alimentazione dei servomotori Dynamixel-P
I servomotori Dynamixel-P utilizzano cavi Dynamixel a 4 pin (come i servomotori Dynamixel MX-28R, MX-64R o MX-106R e le loro varianti MX-28AR, MX-64AR o MX-106AR). Il suffisso "R" indica che questi servomotori utilizzano il protocollo seriale RS-485 per comunicare, come anche i servomotori Dynamixel-P, per cui utilizzano gli stessi cavi a 4 pin.
A differenza degli altri servomotori Dynamixel, i servomotori Dynamixel-P sono alimentati a 24V. Ogni servomotore deve disporre di un'alimentazione propria (non è sufficiente collegarli insieme tramite Daisychain, come nel caso della gamma MX).
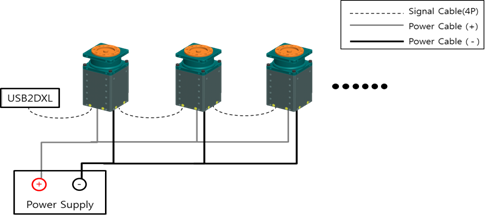
I servomotori Dynamixel-P 54 dispongono di una connessione esterna (connettore molex) che consente di collegarli a un alimentatore, mentre i servomotori di tipo 42 sono alimentati esclusivamente tramite il cavo a 4 pin.
Programmazione degli attuatori Dynamixel-P
I servomotori Dynamixel-P utilizzano il protocollo DXL 2.0, diverso da quello dei servomotori della gamma AX o MX. Tuttavia, questo nuovo protocollo è condiviso con il servomotore mini XL-320.
Per ulteriori informazioni: http: //support.robotis.com/en/techsupport_eng.htm#product/dynamixel_pro.htm
Guida introduttiva per Dynamixel-P: http: //www.generationrobots.com/media/Dynamixel-Pro-Quick-Start-en.pdf