Découvrir les servomoteurs Dynamixel Pro

Dans le monde de la robotique, les servomoteurs numériques Dynamixel sont des superstars. Ces servomoteurs sont utilisés par une large majorité des robots réalisés dans les laboratoires du monde entier. Les servomoteurs Dynamixel sont faciles à utiliser, performants, précis et surtout proposent de nombreuses fonctionnalités. De plus, ces servomoteurs sont programmables depuis une très large gamme de langages de programmation (C#, Java, Python, Labview, Matlab…).
Les servomoteurs Dynamixel se répartissent en 3 grandes familles, incompatibles (ou difficilement) entre elles :
- Les servomoteurs XL-320, c’est un mini servomoteur, peu puissant, utilisé sur le robot Darwin Mini.
- Les servomoteurs de la gamme AX ou MX. Ils partagent le même protocole de communication et on les retrouve souvent sur un même robot (Darwin-OP, Poppy,…). Ce sont les servomoteurs les plus répandus. En allant du AX-12A au MX-106, toute une gamme de servomoteurs est disponible selon leur vitesse ou leur couple.
- Enfin, les servomoteurs Dynamixel Pro qui offrent des performances de type professionnel.
Les servomoteurs Dynamixel Pro
Les servomoteurs Dynamixel Pro constituent une solution pour les robots de taille humaine, que ce soient des robots mobiles, des bras manipulateurs ou des humanoïdes. Les servomoteurs Dynamixel Pro sont plus précis et plus rapides que les servomoteurs Dynamixel classiques de la gamme MX.
Comme le présente l’image suivante, un servomoteur Dynamixel Pro, c’est la combinaison d’un moteur, d’un système de réduction et d’un contrôleur. Comme les servomoteurs Dynamixel classiques, ils sont faciles à connecter et à programmer.
Les servomoteurs Dynamixel Pro proposent un pilotage en vitesse, en position et en couple, ce qui les diffère de nombreux autres servomoteurs.
Enfin, comme les servomoteurs Dynamixel de la gamme MX, les Dynamixel Pro peuvent être liés les uns autres en daisy chain et programmés par le réseau via un ID unique pour chaque servo.
Ci-dessous la vidéo de présentation officielle de la gamme Dynamixel Pro :
Exemples d'usages des servomoteurs Dynamixel Pro
Le robot d’exploration de l’université de Bonn
Le laboratoire des systèmes intelligents autonome de l’université de Bonn a participé à la DLR SpaceBot Cup de 2015 avec un rover portant un bras manipulateur réalisé à l’aide de servomoteurs Dynamixel Pro. La vidéo suivante présente les capacités d’exploration et de manipulation mobile de leur robot :
Pour en savoir plus : http://www.ais.uni-bonn.de/nimbro/Centauro/
Le robot humanoïde Thor-OP
Plusieurs universités américaines dont le célèbre laboratoire Romela (déjà à l’origine du robot Darwin-OP) se sont regroupées pour participer au Darpa Robotics Challenge. Elles ont conçus un robot humanoïde de taille humaine nommé THOR-OP. Cet humanoïde utilise les servomoteurs Dynamixel Pro pour toute la partie haute du corps.

Pour plus d’informations : http://www.thordrc.com/
Les différents servomoteurs Dynamixel Pro
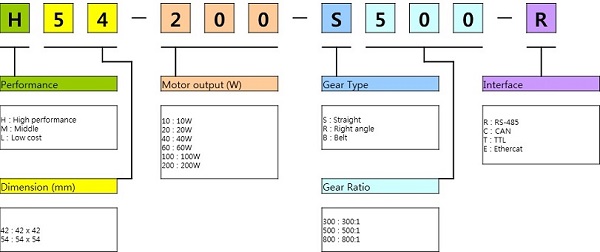
Début 2015, c’est un peu plus de 11 servomoteurs Dynamixel Pro que proposait Robotis, le fabriquant. Le nom des servomoteurs est en fait une codification qui explique le positionnement du servomoteur dans la gamme comme l’explique l’image suivante :
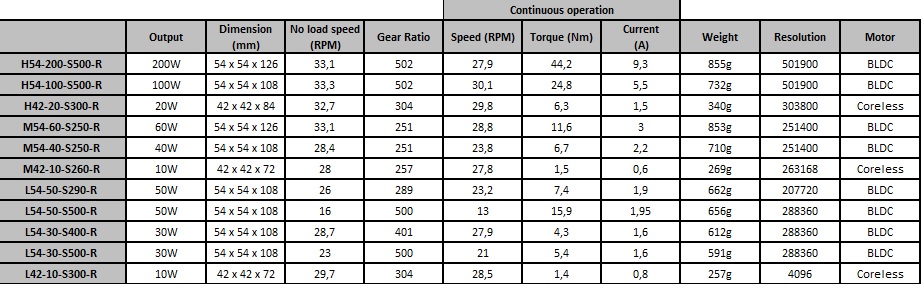
Le tableau suivant compare les performances des différents servomoteurs Dynamixel Pro :
Connexion et alimentation des servomoteurs Dynamixel Pro
Les servomoteurs Dynamixel Pro utilisent des câbles Dynamixel 4pin (comme les servomoteurs Dynamixel MX-28R, MX-64R ou MX-106R et leurs déclinaisons MX-28AR, MX-64AR ou MX-106AR). Le suffixe ‘R’ indique que ces servomoteurs utilisent le protocole série RS-485 pour communiquer, ce qui est le cas également des servomoteurs Dynamixel Pro, ce qui explique qu’ils utilisent les mêmes câbles 4pins.
Contrairement aux autres servomoteurs Dynamixel, les servomoteurs Dynamixel Pro sont alimentés en 24V. Chaque servomoteur doit avoir sa propre alimentation (le fait de les connecter entre eux en Daisychain ne suffit pas comme avec la gamme MX).
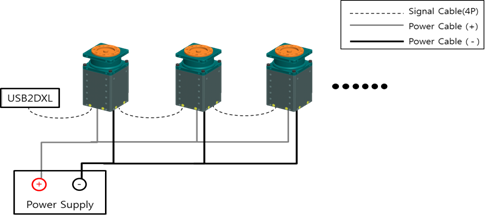
Les servomoteurs Dynamixel Pro 54 ont une connexion externe (connecteur molex) leur permettant d’être reliés à une alimentation tandis que les servomoteurs de type 42 sont alimentés uniquement par le câble 4pin.
Programmation des servomoteurs Dynamixel Pro
Les servomoteurs Dynamixel Pro utilisent le protocole DXL 2.0, qui est différent du protocole pour les servomoteurs de la gamme AX ou MX. Ce nouveau protocole est en revanche partagé avec le mini servomoteur XL-320.
Pour en savoir plus : http://support.robotis.com/en/techsupport_eng.htm#product/dynamixel_pro.htm
Guide de démarrage pour Dynamixel Pro : http://www.generationrobots.com/media/Dynamixel-Pro-Quick-Start-en.pdf