Discovering Dynamixel Pro actuators

In the world of robotics, digital Dynamixel smart actuators are superstars. These actuators are used by a large majority of robots made in laboratories around the world. Dynamixel actuators are easy to use, efficient, accurate and include many features. In addition, these actuators are programmable from a wide range of programming languages (C#, Java, Python, Labview, Matlab ...).
Dynamixel actuators are divided into 3 main families that are incompatible:
- XL-320 Dynamixel actuators, is a mini servomotor, not too powerful, used on the Darwin Mini robot.
- The actuators of the range AX or MX. They share the same communication protocol and are often found on the same robot (Darwin-OP, Poppy,…). These are the most common actuators. Going from the AX-12A to MX-106, a range of actuators is available that is differenciating in their speed or torque.
- Finally, the Dynamixel Pro actuators that offer professional-type performance.
Dynamixel Pro advanced servomotors
Dynamixel Pro advanced actuators are a solution for human-sized robots, whether mobile robots, manipulators or humanoid arms. The Dynamixel Pro actuators are more accurate and faster than conventional Dynamixel actuators of the MX range.
As shown in the following picture, a Dynamixel Pro servomotor is the combination of a motor, a reduction system and a controller. Like traditional Dynamixel actuators, they are easy to connect and program.
The Dynamixel Pro actuator offer speed, position and torque control, which is different to many other actuators
Finally, as the Dynamixel MX range, Dynamixel Pro can be linked to each other in daisy chain and programmed by the network using a unique ID for each servo.
Here is the official presentation video of the Dynamixel Pro range of products:
Usage examples of Dynamixel actuators Pro
The exploration robot from the University of Bonn
The laboratory of Autonomous Intelligent Systems at the University of Bonn attended the DLR SpaceBot Cup 2015 with a rover carrying a manipulator arm achieved using Dynamixel Pro actuators. The following video shows the capabilities of their exploration and manipulation mobile robot:
To know more : http://www.ais.uni-bonn.de/nimbro/Centauro/
The Thor-OP humanoid robot
Several American universities including the famous laboratory Romela (already behind the Darwin-OP) came together to participate in the DARPA Robotics Challenge. They have developed a human-sized robot called THOR-OP. This humanoid uses Dynamixel Pro servomotors for the entire upper body.

To know more: http://www.thordrc.com/
The Dynamixel Pro range of products
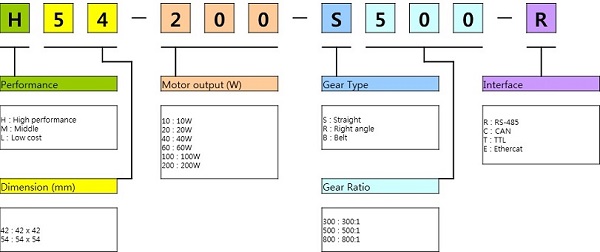
11 Dynamixel Pro high end actuators are proposed by the manufacturer at the begining of 2015. The name of the actuators is actually a codification which explains the positioning of the actuator in the range as explained in the following picture:
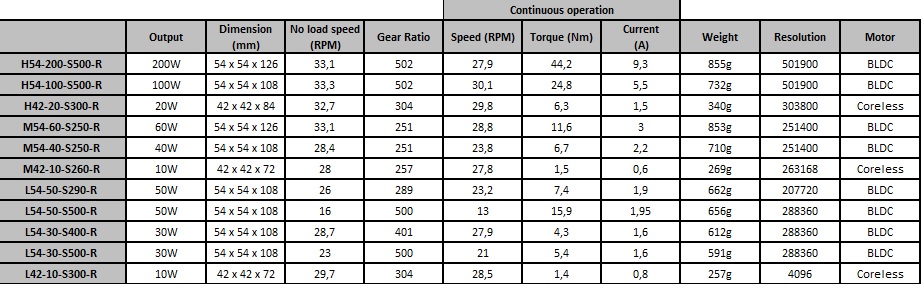
The following table compares the performance of the Dynamixel Pro high end actuators:
Powering and connectinf Dynamixel actuators Pro
Dynamixel Pro servomotors use 4pin cables (such as Dynamixel MX-28R, MX-64R or MX-106R and MX-28AR, MX-64AR or MX-106AR ). The suffix 'R' indicates that these actuators use the RS-485 serial protocol to communicate, which is also the case for Dynamixel Pro actuators and which is why they use the same 4pins cables.
Unlike other Dynamixel actuators, Dynamixel Pro actuators are supplied with 24V. Each actuator must have its own power (to connecting them in Daisychain not enough to power them as with MX).
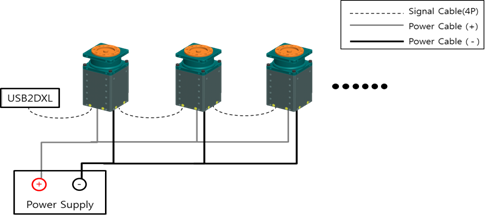
The Dynamixel Pro "54" have an additional external connection (molex connector) allowing them to be connected to a power supply while Dynamixel Pro "42" type actuators are powered only by the 4pin cable.
Programming the Dynamixel Pro
The Dynamixel Pro actuators use the brand new DXL 2.0 protocol, which is different from the protocol for actuators AX or MX range. This new protocol, however, is also shared with the mini servo XL-320.
To knwo more: http://support.robotis.com/en/techsupport_eng.htm#product/dynamixel_pro.htm
Starting guide for Dynamixel Pro: http://www.generationrobots.com/media/Dynamixel-Pro-Quick-Start-en.pdf