mit ultragroßem Winkel")
 mit ultragroßem Winkel")
 mit ultragroßem Winkel")
 mit ultragroßem Winkel")
 mit ultragroßem Winkel")
 mit ultragroßem Winkel")
 mit ultragroßem Winkel")
 mit ultragroßem Winkel")
Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Der OS0 LiDAR hat ein ultragroßes Sichtfeld (90°), mit dem er alles sehen kann - vom Boden bis zur Decke.
Die Versorgung der REV7 Palette erfolgt durch den L3 Chip der neuen Generation, der zum ersten Mal eine Hintergrundbeleuchtung bietet. Er hat einige interessante Merkmale:
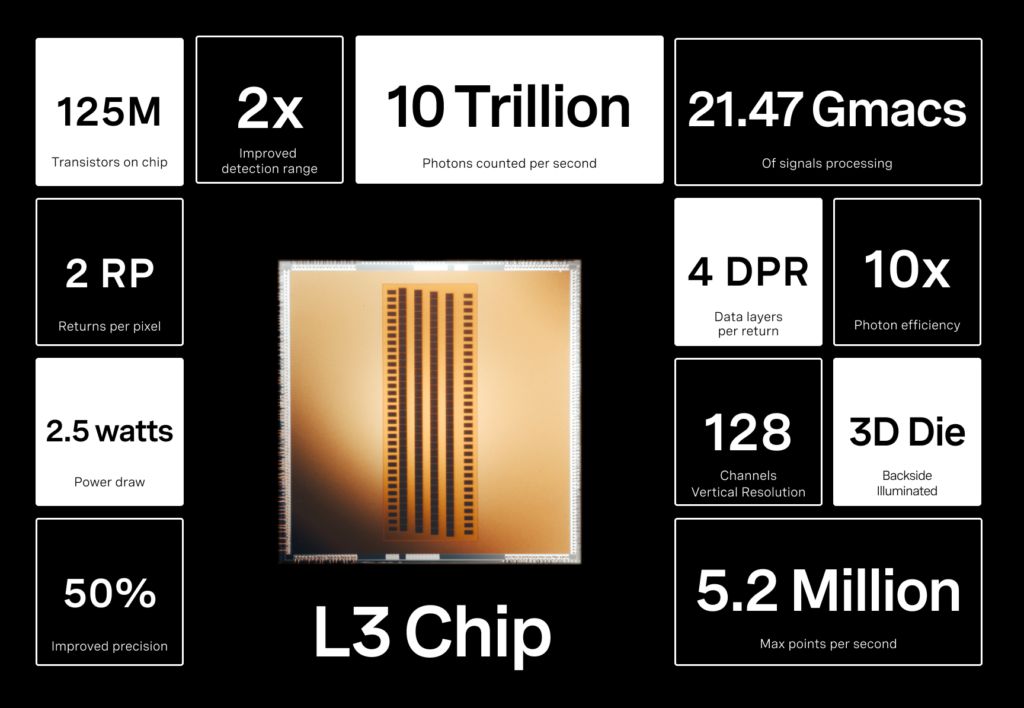
Dank dieses Chips können die REV7 LiDARs von Ouster alles sehen, und zwar über größere Entfernungen und mit höherer Genauigkeit für ein verbessertes Mapping, eine präzisere Hinderniserkennung und einen sichereren autonomen Betrieb im Innen- und Außenbereich.
 mit ultragroßem Winkel")
Der OS0 LiDAR hat ein ultragroßes Sichtfeld (90°), mit dem er alles sehen kann - vom Boden bis zur Decke.