")
")
")
Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
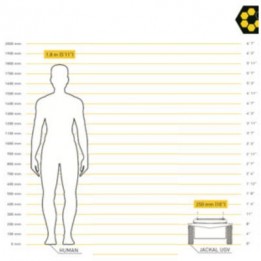
Le drone terrestre A300 de Clearpath Robotics est une plateforme mobile robuste, capable de transporter 100 kg, avec une autonomie pouvant atteindre 12 heures et une compatibilité ROS 2 Jazzy pour une intégration facile des capteurs.

Le Husky AMP inclut tous les capteurs, équipements et logiciels nécessaires à la navigation autonome en extérieur. Les clients peuvent installer leurs charges utiles et déployer un robot sans avoir à investir dans des développements et tests de navigation coûteux. Votre temps d'ingénierie est précieux !
Inclus :

Équipé de systèmes avancés de capteurs et de vision, l’Observer est parfaitement adapté à la surveillance à distance, à l’inspection et à la capture de données. Qu’il s’agisse d’inspecter des infrastructures ou d’effectuer des rondes de sécurité, AMP agit comme vos yeux sur le terrain.

Équipée d’un bras robotique, la configuration Manipulator permet au Husky AMP d’interagir avec son environnement. Elle est idéale pour des tâches telles que le prélèvement d’échantillons, la maintenance et la manipulation d’objets. Cette configuration est conçue pour les applications où la dextérité et la précision du contrôle sont essentielles.

")
Le drone terrestre A300 de Clearpath Robotics est une plateforme mobile robuste, capable de transporter 100 kg, avec une autonomie pouvant atteindre 12 heures et une compatibilité ROS 2 Jazzy pour une intégration facile des capteurs.