")
")
")
")
Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
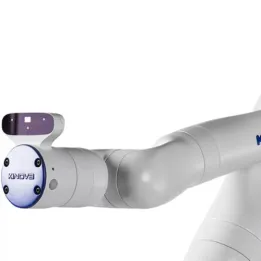
FR3 est un robot collaboratif avec 7 degrés de liberté, à la sécurité homologuée, développé par la société allemande FRANKA ROBOTICS. Ce robot conçu pour la recherche et les pôles R&D permet un contrôle direct et la possibilité de le programmer et de l’interfacer avec des capteurs externes (packages et librairies pour ROS, ROS2, MoveIt!, mais aussi Matlab).


")
FR3 est un robot collaboratif avec 7 degrés de liberté, à la sécurité homologuée, développé par la société allemande FRANKA ROBOTICS. Ce robot conçu pour la recherche et les pôles R&D permet un contrôle direct et la possibilité de le programmer et de l’interfacer avec des capteurs externes (packages et librairies pour ROS, ROS2, MoveIt!, mais aussi Matlab).