Fonctionnalités du robot Ridgeback
Le robot Ridgeback est une plateforme omnidirectionnelle de grande qualité dédié à la recherche (le robot n'est pas certifié pour un usage productif). Il est équipé de roues omnidirectionnelles Mecanum, activées par des moteurs de grande qualité et des encodeurs précis (35840 pulses par tour), lui permettant d'être positionné avec précision selon 3 degrés de manoeuvrabilité.
La souplesse du robot Ridgeback permet d'envisager des algorithmes de planification de trajectoire évolués ou au contraire, il peut simuler un robot plus contraint en limitant ses déplacements latéraux.
Grâce à ses deux lasers (demander l'option laser arrière), le robot Ridgeback a un visibilité 360°, offrant ainsi la garantie d'une trajectoire et des déplacements autonomes évitant toute collision.
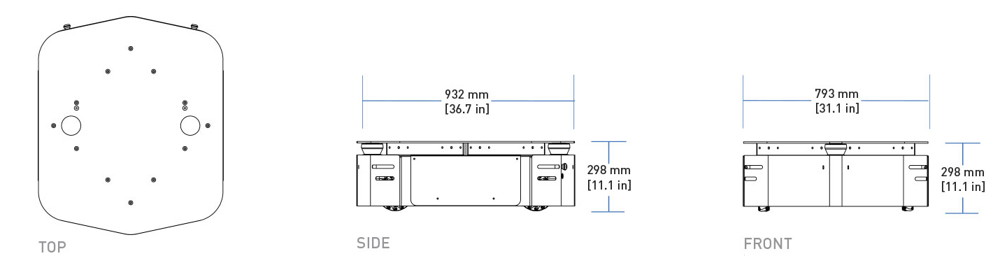
Le robot Ridgeback possède une hauteur de 30cm seulement et une largeur de 80cm lui permettant de franchir les portes. Il possède également une suspension passive afin de franchir les petits obstacles tels que les transitions de types de sol (passage de la moquette au béton par exemple).
Enfin, le robot Ridgeback est personnalisable à souhait, tant au niveau matériel qu'au niveau logiciel (grâce à son SDK ROS), faisant de ce robot un robot de choix pour le prototypage, le développement, l'enseignement ou la recherche.