Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
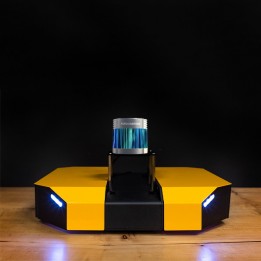
Der Roboter Ridgeback ist eine omnidirektional verfahrbare Roboterplattform für den Einsatz in Innenräumen. Der komplett integrierte Roboter ist mit Laserscannern vorne und hinten ausgestattet und besitzt außerdem eine Inertialeinheit. Der Roboter Ridgeback bietet eine native Integration in ROS und Gazebo.
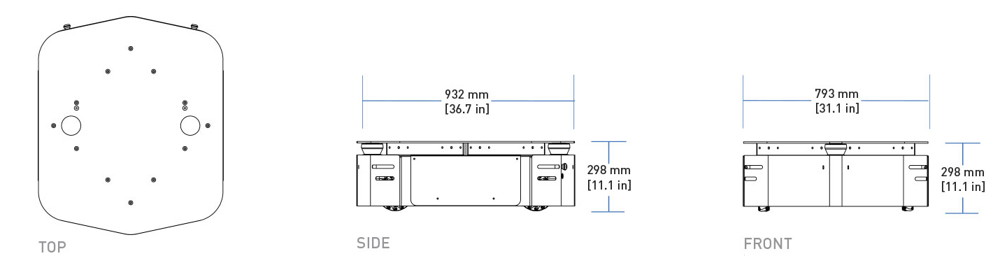
Der Roboter Ridgeback weist folgende Abmessungen auf:

Der Roboter Ridgeback ist eine omnidirektional verfahrbare Roboterplattform für den Einsatz in Innenräumen. Der komplett integrierte Roboter ist mit Laserscannern vorne und hinten ausgestattet und besitzt außerdem eine Inertialeinheit. Der Roboter Ridgeback bietet eine native Integration in ROS und Gazebo.