MakerBeam
MakerBeam a développé une gamme de mini profilés aluminium (et un système de fixation simple avec une clé M3), qui vont permettre de monter (et démonter) rapidement des structures robustes, légères et modulables (châssis robotique, structures d’imprimantes 3D, de bras articulés...).










































Kit de démarrage régulier anodisé noir comprenant les poutres, les supports, les écrous et les boulons.


Lot de 12 supports droits MakerBeam en inox.
Voir notre gamme de supports MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL

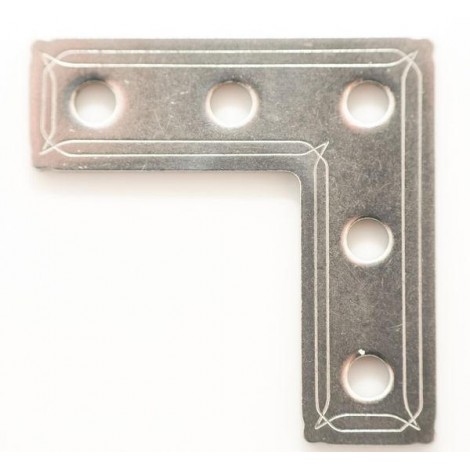
Besoin de plus de pièces de montage pour l’assemblage de vos profilés ? Voici un lot de 12 équerres MakerBeam, compatibles OpenBeam et MakerBeam XL.


Un kit de profilés OpenBeam complet, avec supports, visserie et tournevis.


Ces équerres MakerBeam vous permettent de concevoir de robustes projets avec les profilés OpenBeam et MakerBeamXL.


Chaque équerre en L MakerBeam permet la création de projets solides et résistants sur MakerBeam ou OpenBeam.


L'équerre en T MakerBeam s'intègre à tous vos projets conçus avec les profilés OpenBeam et MakerBeamXL.

Ce tournevis hexagonal est compatible avec les boulons de la marque MakerBeam.
Voir notre gamme d'accessoires MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL

Cette clé Allen (2mm) est compatible avec les boulons à tête carrée de la marque MakerBeam.
Voir notre gamme d'accessoires MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL


Ces embouts imprimés en 3D ajouteront un bel aspect fini à votre construction MakerBeam et l'aideront dans sa stabilité. Ils sont faciles à emboîter sur vos profilés et peuvent se réutiliser facilement.
Voir notre gamme d'accessoires MakerBeam.
Compatibilité : MakerBeam

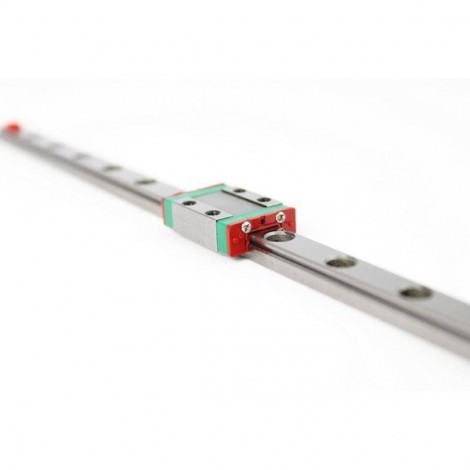
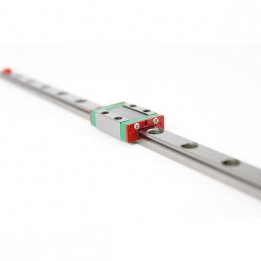
Ce rail de guidage vous aidera à réaliser des constructions MakerBeam solides et droites.
Voir notre gamme d'accessoires MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL


Sachet de 250 écrous standards MakerBeam.
Voir toute notre visserie MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL


Sachet de 100 écrous autobloquants M3 DIN 958 MakerBeam, résistants aux vibrations. Ils peuvent être réutilisés.
Voir toute notre visserie MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL

Sachet de 50 bouchons à vis MakerBeam, avec leurs rondelles de fixation.
Voir toute notre visserie MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL


Sachet de 4 écrous moletés MakerBeam.
Voir toute notre visserie MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL


Sachet de 100 boulons avec tête allongée MakerBeam M3, longueur : 6mm.
Voir toute notre visserie MakerBeam.
Compatibilité : MakerBeam

Sachet de 250 boulons avec tête carrée MakerBeam M3, longueur : 6mm.
Voir toute notre visserie MakerBeam.
Compatibilité : MakerBeam


Sachet de 25 boulons avec tête carrée MakerBeam M3, longueur : 25mm.
Voir toute notre visserie MakerBeam.
Compatibilité : MakerBeam


Sachet de 10 roulements à bille MakerBeam. Le sachet comprend également la visserie pour le montage (10 boulons M3 12m à tête cruciforme, 10 écrous M3, 10 écrous autobloquants, 10 rondelles. Epaisseur : 5mm, dimensions extérieures : 13mm, diamètre intérieur : 3mm
Voir notre gamme d'accessoires MakerBeam.
Compatibilité : MakerBeam


Ces embouts en vinyle ajouteront un bel aspect fini à votre construction MakerBeam. Ils sont faciles à emboîter sur vos profilés et peuvent se réutiliser facilement.
Voir notre gamme d'accessoires MakerBeam.
Compatibilité : MakerBeam


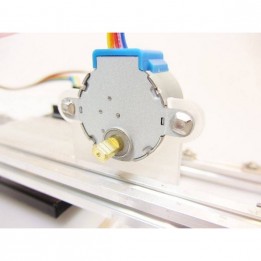
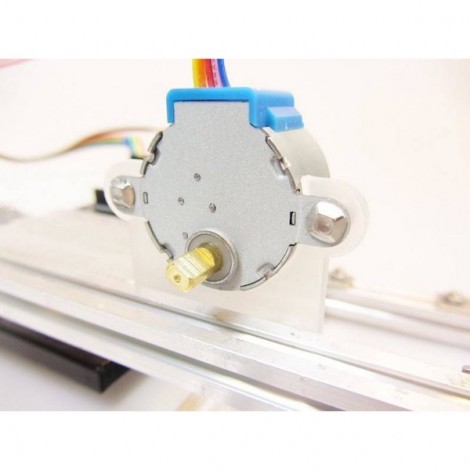
e support MakerBeam pour micro moteur pas-à-pas est imprimé en 3D et livré avec 4 boulons M3 et 4 écrous. Il vous permettra d'ajouter des petits moteurs pas-à-pas ronds à vos projets MakerBeam.
Voir notre gamme de supports MakerBeam.
Compatibilité : MakerBeam
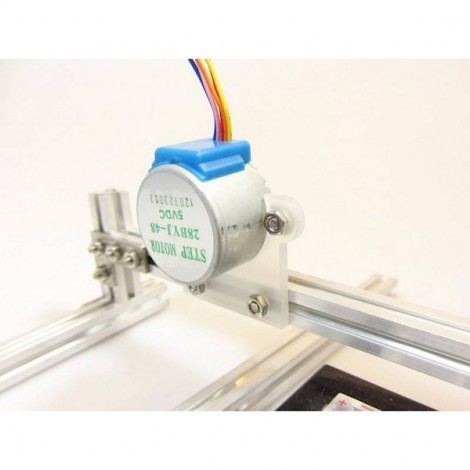
Ce support plat MakerBeam pour micro moteur pas-à-pas est conçu en Perspex opaque et livré avec sa visserie. Il vous permettra d'ajouter des petits moteurs pas-à-pas ronds à vos projets MakerBeam.
Voir notre gamme de supports MakerBeam.
Compatibilité : MakerBeam
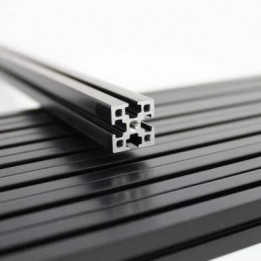
Profilé taraudé MakerBeam 1500mm (alu). Largeur et hauteur = 10mm x 10mm. Vous trouverez ci-dessous un schéma technique.
Voir notre gamme de profilés MakerBeam.

Profilé taraudé MakerBeam 10mm (alu). Largeur et hauteur = 10mm x 10mm. Vous trouverez ci-dessous un schéma technique.
Voir notre gamme de profilés MakerBeam.