




















Con un carico utile di 15 kg, il braccio robotico Doosan M1509 è lo strumento perfetto per gli operatori che devono movimentare ripetutamente carichi pesanti.



Il braccio robotico Doosan M0609 è uno strumento robotico collaborativo ideale per tutte le operazioni ripetitive svolte in spazi ridotti.


Il più versatile dei bracci robotici della gamma ROS Doosan ha uno sbraccio di 1,30 m e un carico utile di 10 kg. Si adatta a tutti i vostri progetti di automazione, sia in termini di forza che di flessibilità.
La piastra di montaggio per il braccio OpenManipulator-Pro consente di fissare facilmente il braccio robotico a un tavolo o a un'altra superficie piana.

La Base Plate-02 per OpenManipulator consente di fissare l'accessorio TurtleBot 3 a una superficie piana e sicura.


Questo kit per OpenManipulator RM-X52 è offerto qui con i suoi servomotori. Consente di aggiungere nuove funzionalità alla piattaforma robotica TurtleBot3 Waffle o Waffle Pi.
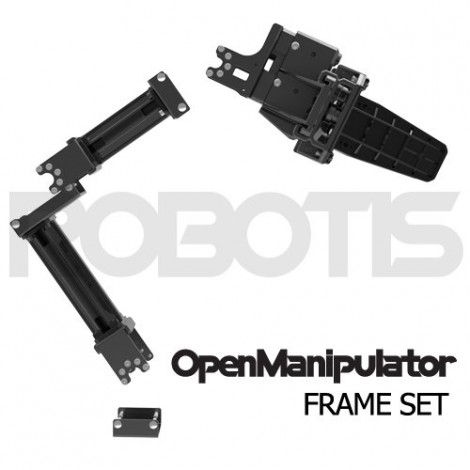
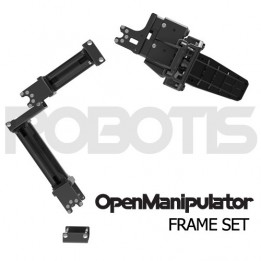
Progetta un braccio robotico OpenManipulator compatibile con ROS (simile al braccio RM-X52) per il tuo TurtleBot3. Questo set comprende tutte le parti meccaniche e gli strumenti necessari.

Alcuni robot sono più resistenti di altri... e con la pinza Robotis RH-P12-RN, il vostro sarà presto nel club!

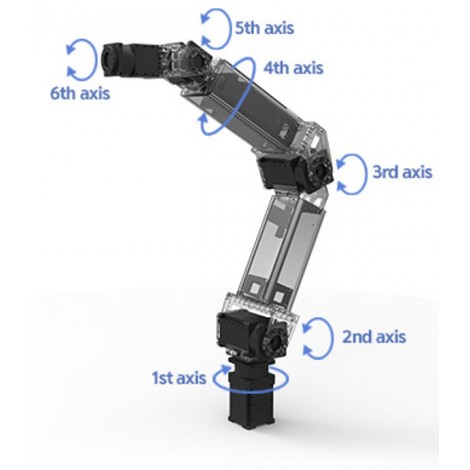
Il braccio robotico a 6 assi ROBOTIS OpenManipulator-PRO, compatibile con ROS, vi stupirà per la sua forza e robustezza, oltre che per la sua precisione e abilità. Vi offre un controllo ultra-preciso su ogni sua azione e viene fornito con un ambiente di programmazione ultra-completo.

Alimentato da sei servomotori Dynamixel intelligenti, il braccio robotico WidowX offre grande agilità e coppia elevata.


Il piedistallo per i robot Sawyer Baxter consente di mantenere il robot a un'altezza definita e di spostare facilmente Baxter se necessario.

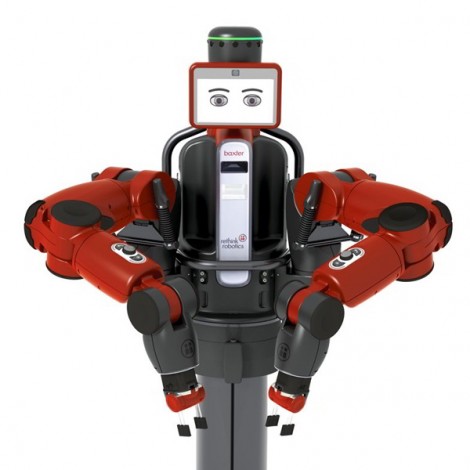
La versione per la ricerca e la didattica del famoso robot Baxter, creato da Rodney Brooks, rappresenta la base ideale per un'ampia gamma di progetti che riguardano l'informatica, l'intelligenza artificiale, l'interazione uomo-robot, il controllo, il riconoscimento e la manipolazione di oggetti, l'apprendimento...