-34.928,00 €

Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Incluso 4,17 € per l'ecotassa (non influenzato dallo sconto)
/!\ Robot usato /!\
Il robot Baxter è stato creato dalla società Rethink Robotics , fondata da Rodney Brooks, famoso direttore del laboratorio di intelligenza artificiale del MIT per 10 anni e co-fondatore della società IRobot. Il robot Baxter è emblematico della nuova linea di robot collaborativi o cobots .
La robotica collaborativa consiste nel pensare i robot in modo che lavorino a contatto e in collaborazione con l'uomo, al contrario dei robot industriali classici che automatizzano un lavoro su una catena di produzione ma che non interagiscono con l'uomo durante il processo. Un robot collaborativo è quindi meno rapido dei robot industriali tradizionali ed è " compliant ", vale a dire che i suoi movimenti sono elastici, non pericolosi per l'uomo e più simili a quelli che si possono trovare in natura.
L'idea della robotica collaborativa consiste nel fatto che, anziché eseguire un unico lavoro in modo permanente, come nel caso di un robot industriale classico, il robot collaborativo può eseguire più piccoli lavori diversi nel corso di una stessa giornata, in diverse aree dell'azienda e interagire con le persone sulla catena di produzione. Si tratta di un modo del tutto nuovo di concepire la robotica industriale, particolarmente adatto alle piccole imprese che non hanno un volume sufficiente per automatizzare un lavoro, ma che aumentano la loro produttività se possono automatizzare più lavori a valore aggiunto ridotto.
Il robot Baxter proposto qui è la versione ricerca e formazione. Rispetto alla versione "manufacturing", l'unica differenza è la logica che viene utilizzata. In effetti, la versione per la ricerca e l'educazione del robot Baxter è realizzata con un SDK compatibile con ROS, mentre la versione per la produzione è realizzata con una logica di produzione sviluppata da Rethink Robotics.
Il robot Baxter può essere utilizzato come supporto per diversi progetti di ricerca o di educazione, come l'interazione uomo-robot, la robotica collaborativa, la pianificazione, la ricognizione e la manipolazione di oggetti, l'informatica, le scienze cognitive...
Il robot Baxter costituisce una soluzione di scelta per la concezione dell'azienda del futuro e, a questo titolo, è particolarmente adatto ai dipartimenti di Ricerca e Sviluppo delle aziende che desiderano indagare il settore della robotica collaborativa.
In qualità di robot collaborativo, il robot Baxter è:
Le specifiche tecniche del robot Baxter sono le seguenti:
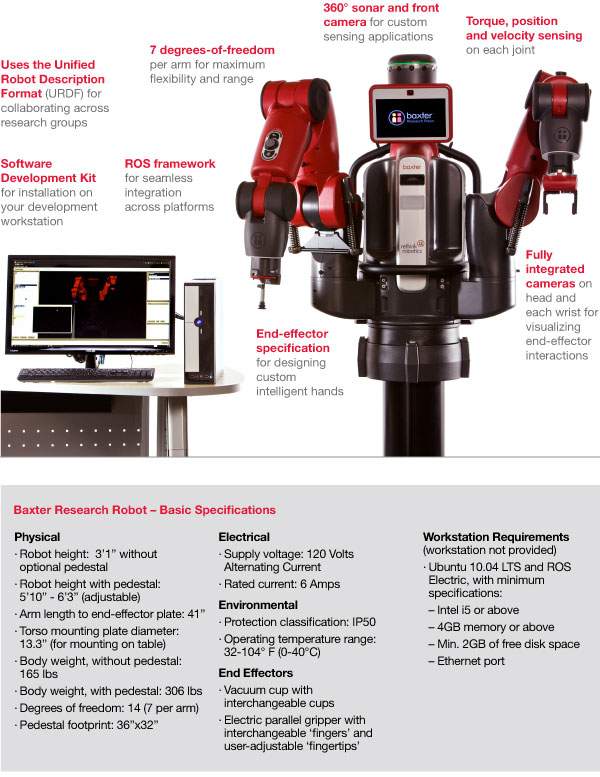
Per riassumere l'immagine qui sopra, Baxter ha due sostegni a 7 gradi di libertà, messi in movimento da attuatori elettrici con sensori di coppia nei motori, 3 telecamere integrate, sensori sonori di distanza e una copertura per la testa.
Rethink Robotics propone due dispositivi di sicurezza (end effector) possibili per i sostegni del robot Baxter :
Questi due dispositivi sono proposti in quanto prodotti aggiuntivi al robot Baxter e non sono inclusi per difetto, lasciando a te la scelta dei dispositivi di sicurezza sul tuo robot. Rethink Robotics fornisce tutta la documentazione tecnica (meccanica e logica) per la creazione del proprio pre-progettista. È quindi possibile creare il proprio pre-professionista per Baxter o adattare un pre-professionista esistente.
Carica la brochure in formato PDF del robot Baxter :

Il robot qui proposto viene offerto senza il piedistallo e senza gli effettivi finali (pinze). Devi aggiungere questi elementi se non li possiedi.
La versione ricerca e istruzione del robot Baxter si differenzia dalla versione "manufacturing" solo per la logica. Se le due versioni utilizzano un medesimo cuore del software logiciel, la versione ricerca e istruzioen viene programmata in ROS con l'ausilio di un Kit di Sviluppo-SDK ROS funzionante al di sotto di questo cuore logiciel.
L'SDK ROS, ben documentato, è fornito da Baxter Research. Su Baxter è presente un software ROS master che pubblica tutte le informazioni sullo stato del robot, le informazioni fornite dai motori (posizione, coppia...), le trasformazioni, le informazioni di diagnostica, i dati dei sensori e che consente di ricevere gli ordini di pilotaggio di un programma ROS a distanza su un PC collegato a Baxter. Il programma ROS su PC permette di pilotare Baxter e quindi di realizzare un collegamento performante con tutte le librerie ROS desiderate.

L'insieme degli utenti della versione di ricerca e istruzione di Baxter interagisce su un forum privato, animato da Rethink Robotics e dai suoi partner, in particolare Génération Robots. Come utente Baxter, potrai interagire con i tuoi colleghi di tutto il mondo, comprese prestigiose università come il MIT.
Le Marine Robotics Group del MIT usa Baxter per il riconoscimento e la manipolazione degli oggetti. John J. Leonard, professore di meccanica al MIT, ha commentato così l'arrivo di Baxter: "Abbiamo 'reclutato' Baxter e l'abbiamo equipaggiato con un sensore di profondità X-Tion ASUS, simile al Kinect, in modo che Baxter possa posizionarsi autonomamente in un punto, scansionare gli oggetti, imparare a riconoscerli e sviluppare strategie di manipolazione degli oggetti."
"Il robot ci evita la parte fastidiosa della scansione degli oggetti e ci permette di focalizzarci sul cuore delle nostre ricerche."
Il robot Baxter è utilizzato nell'ambito del programma Robotics Engineering, programma di formazione universitaria di primo livello del Worcester Polytechnic Institute negli Stati Uniti. Il WPI utilizza Baxter per modernizzare un corso di robotica industriale già esistente. Il corso costituisce un'introduzione ai sistemi di produzione robotizzati. Lo stesso robot Baxter verrà utilizzato dal WPI per i suoi insegnamenti di livello Master e in particolare per lo studio di nuovi tipi di ricerca.
Il Prof. Michael A. Gennert, direttore del Worcester Polytechnic Institute, ha commentato l'arrivo di Baxter all'interno della sua università: "Baxter è particolarmente adatto alle attività di ricerca grazie al suo SDK che è open-source e basato su ROS."
"I nostri studenti del primo e secondo ciclo hanno appreso ROS durante i corsi e lo utilizzano già nei loro progetti e sono quindi in grado di sviluppare programmi per Baxter."
William C. Messner, direttore del dipartimento di meccanica dell'università Tufts, ha spiegato la scelta di Baxter: "La ragione principale della nostra scelta del robot Baxter è il costo contenuto rispetto a ciò che viene proposto, il fatto che sia sicuro e la nostra capacità di accedere ai motori e ai dispositivi del robot attraverso il Kit di Sviluppo-SDK ROS che viene fornito.
La Tufts University propone un corso di studi originale nel settore della robotica e delle scienze cognitive e ha, a questo titolo, grandi ambizioni per il robot Baxter all'interno del suo corso. Il corso di Ingegneria dei Fattori Umani esplora le interazioni tra l'uomo e il robot quando questi lavorano a distanza l'uno dall'altro ed esamina in particolare l'allocazione possibile dei compiti massimizzando le prestazioni a livello globale.
L'accesso ai modelli 3D è limitato ai clienti che possiedono un robot Baxter. Contattateci via e-mail all'indirizzo support@generationrobots.com
Puoi seguire questo link.
Puoi seguire questo link.
Sì