Risorse del robot umanoide Unitree G1 Edu
FAQ sul robot umanoide Unitree G1 Edu
A cosa serve il robot umanoide Unitree G1 Edu?
Il Unitree G1 Edu è progettato per la ricerca, l’istruzione superiore e lo sviluppo robotico. Può essere utilizzato per progetti di locomozione umanoide, manipolazione, percezione integrata e interazione robotica.
Qual è la differenza tra le versioni del G1 Edu?
Le versioni del G1 Edu si distinguono per il numero di gradi di libertà, la presenza o meno di gripper e il livello di equipaggiamento per attività di manipolazione e sviluppo embedded.
Il Unitree G1 Edu integra sensori per la percezione?
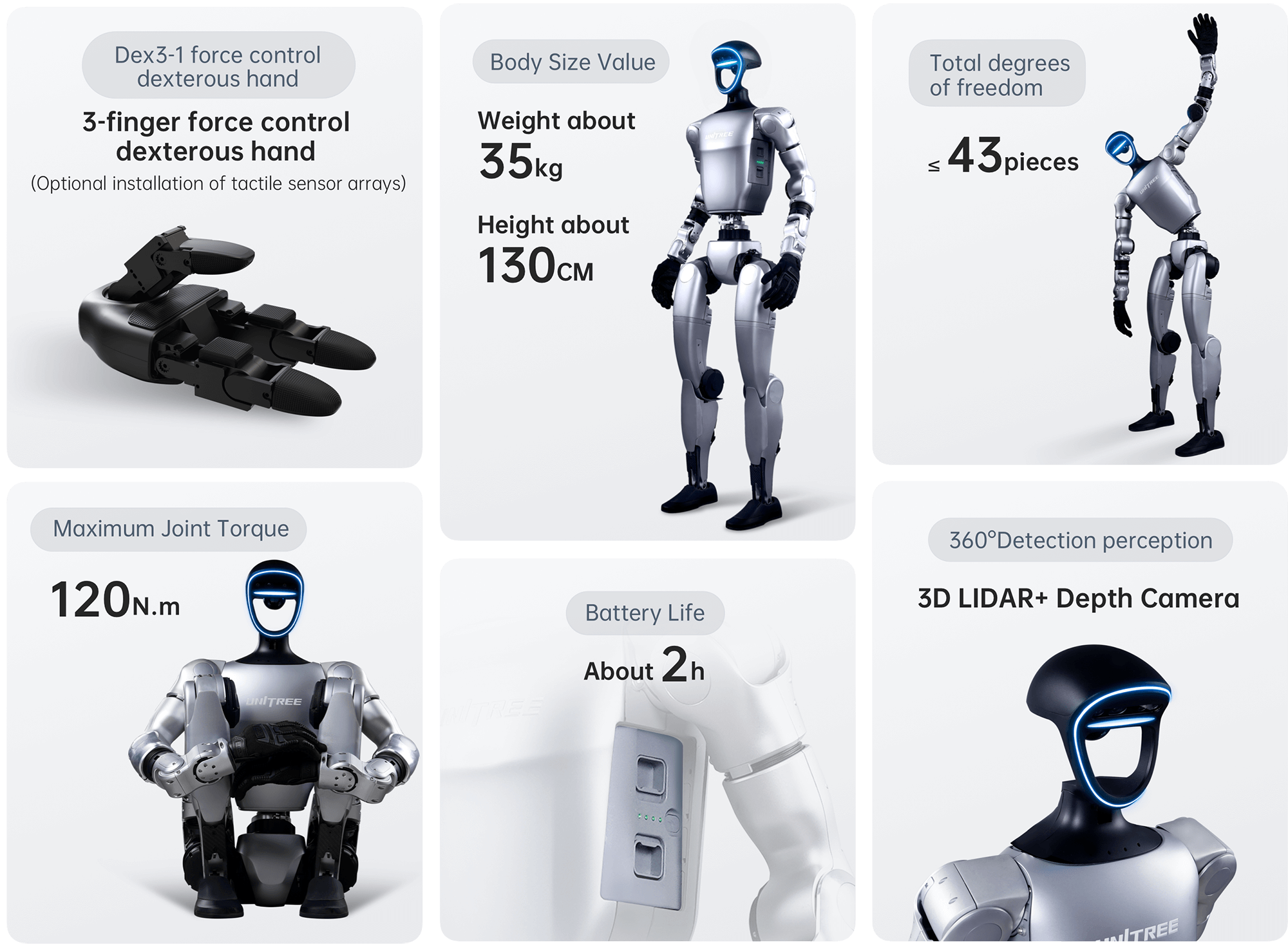
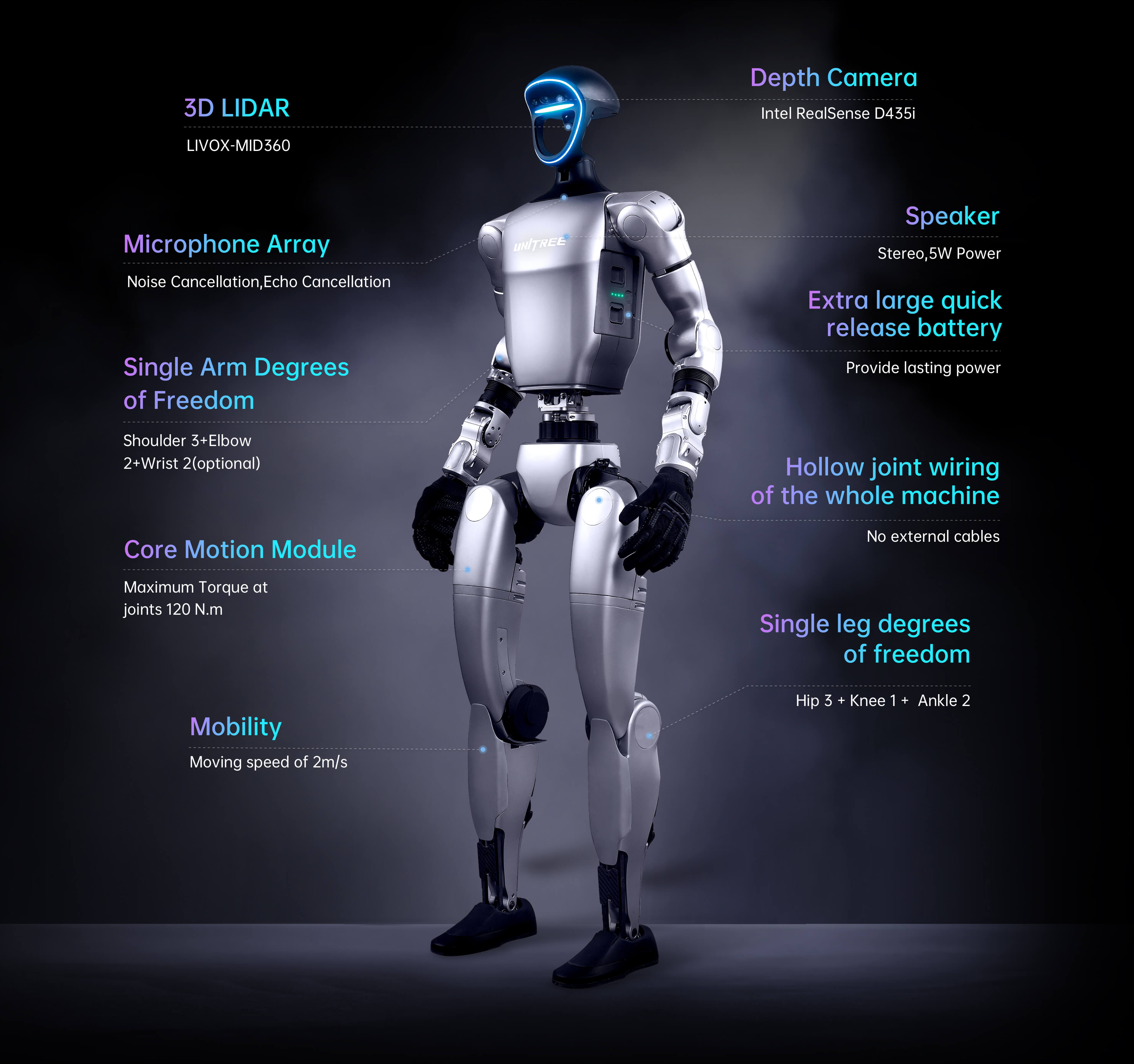
Sì, il G1 Edu integra una camera di profondità e un LiDAR 3D, consentendo di lavorare su progetti di visione, percezione spaziale e interazione con l’ambiente.
Il G1 Edu è adatto a progetti di manipolazione robotica?
Sì, a seconda della versione scelta, il Unitree G1 Edu può essere dotato di diversi gripper, inclusi modelli tattili. Può quindi essere utilizzato per prove di presa, manipolazione e interazione fisica.
Il robot umanoide Unitree G1 Edu è adatto a un laboratorio o a un’università?
Sì, il G1 Edu è adatto a laboratori, università, docenti-ricercatori e team R&D che cercano una piattaforma umanoide compatta per attività di robotica umanoide, controllo del movimento, percezione e manipolazione.