Ressources du robot humanoïde Unitree G1 Edu
FAQ sur le robot humanoïde Unitree G1 Edu
À quoi sert le robot humanoïde Unitree G1 Edu ?
Le Unitree G1 Edu est conçu pour la recherche, l’enseignement supérieur et le développement robotique. Il peut être utilisé pour des projets de locomotion humanoïde, de manipulation, de perception embarquée et d’interaction robotique.
Quelle est la différence entre les versions du G1 Edu ?
Les versions du G1 Edu se distinguent par le nombre de degrés de liberté, la présence ou non de grippers et le niveau d’équipement pour les travaux de manipulation et de développement embarqué.
Le Unitree G1 Edu intègre-t-il des capteurs pour la perception ?
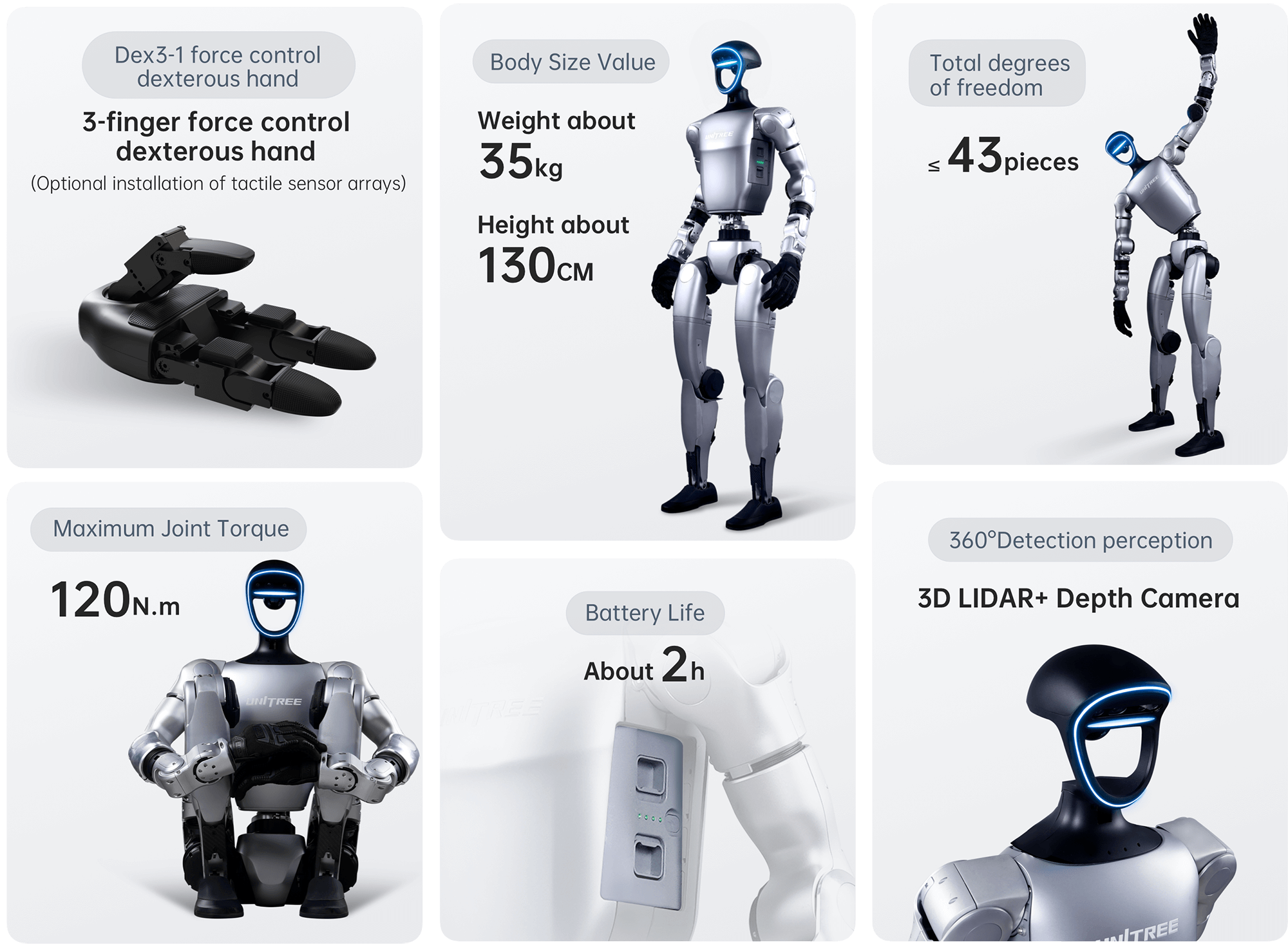
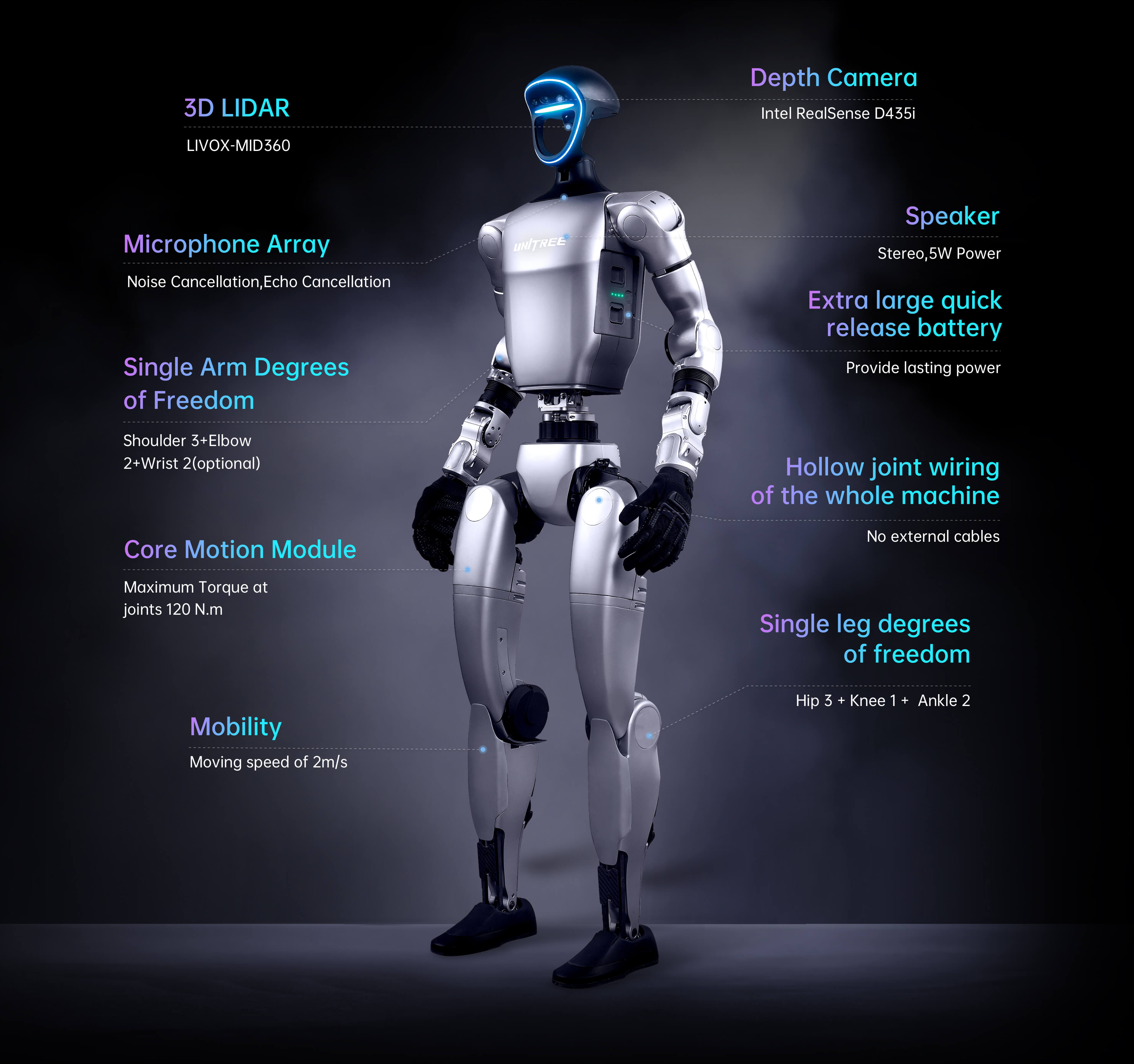
Oui, le G1 Edu embarque une caméra de profondeur et un LiDAR 3D, ce qui permet de travailler sur des projets de vision, de perception spatiale et d’interaction avec l’environnement.
Le G1 Edu est-il adapté à des projets de manipulation robotique ?
Oui, selon la version choisie, le Unitree G1 Edu peut être équipé de différents grippers, y compris des modèles tactiles. Il peut donc être utilisé pour des essais de préhension, de manipulation et d’interaction physique.
Le robot humanoïde Unitree G1 Edu convient-il à un laboratoire ou à une université ?
Oui, le G1 Edu convient aux laboratoires, universités, enseignants-chercheurs et équipes R&D qui recherchent une plateforme humanoïde compacte pour des travaux en robotique humanoïde, en contrôle du mouvement, en perception et en manipulation.