Resources for the Unitree G1 Edu humanoid robot
FAQ about the Unitree G1 Edu humanoid robot
What is the Unitree G1 Edu humanoid robot used for?
The Unitree G1 Edu is designed for research, higher education and robotics development. It can be used for projects involving humanoid locomotion, manipulation, on-board perception and robotic interaction.
What is the difference between the G1 Edu versions?
The G1 Edu versions differ in terms of the number of degrees of freedom, the presence or absence of grippers, and the equipment level for manipulation and embedded development work.
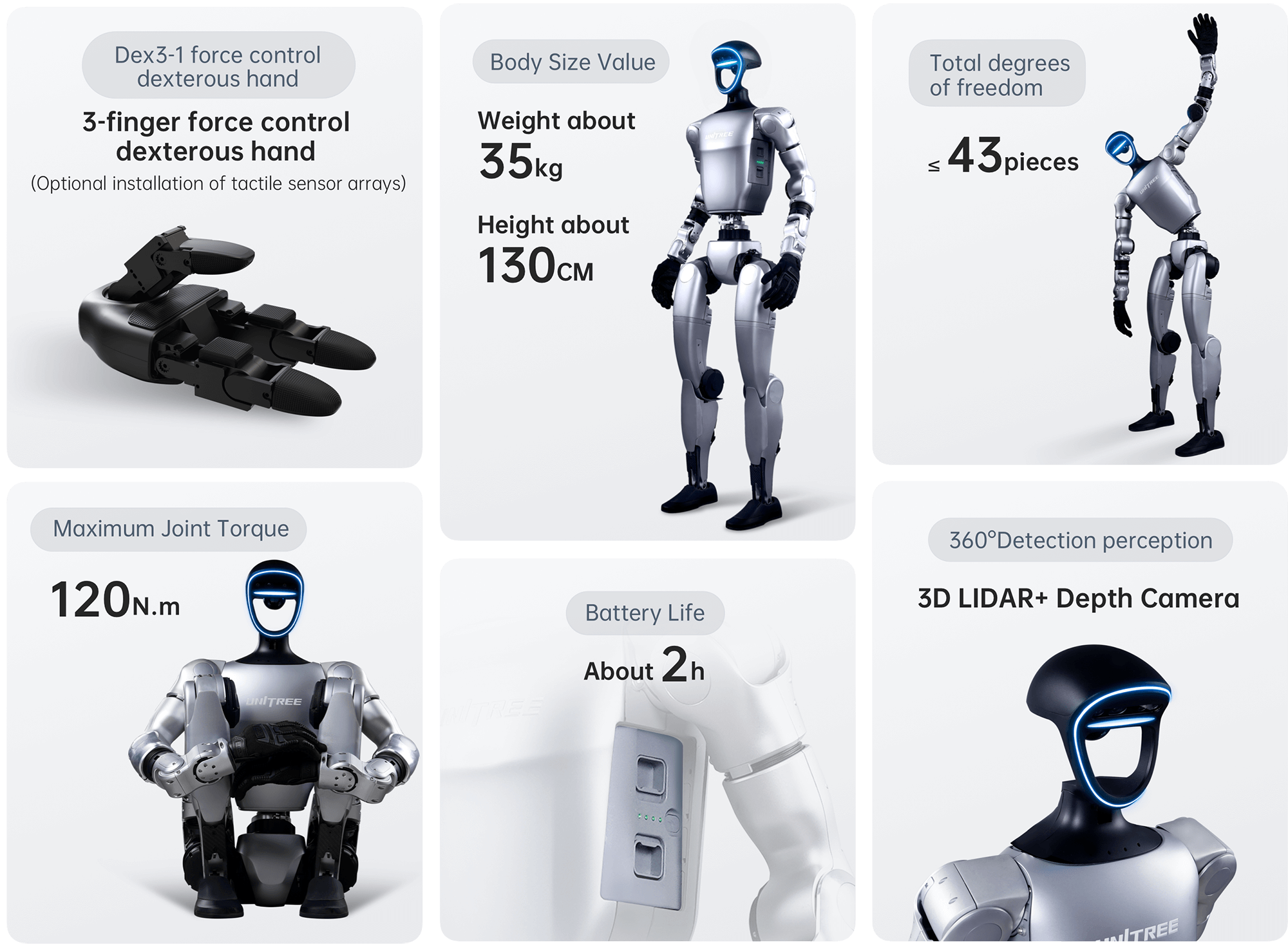
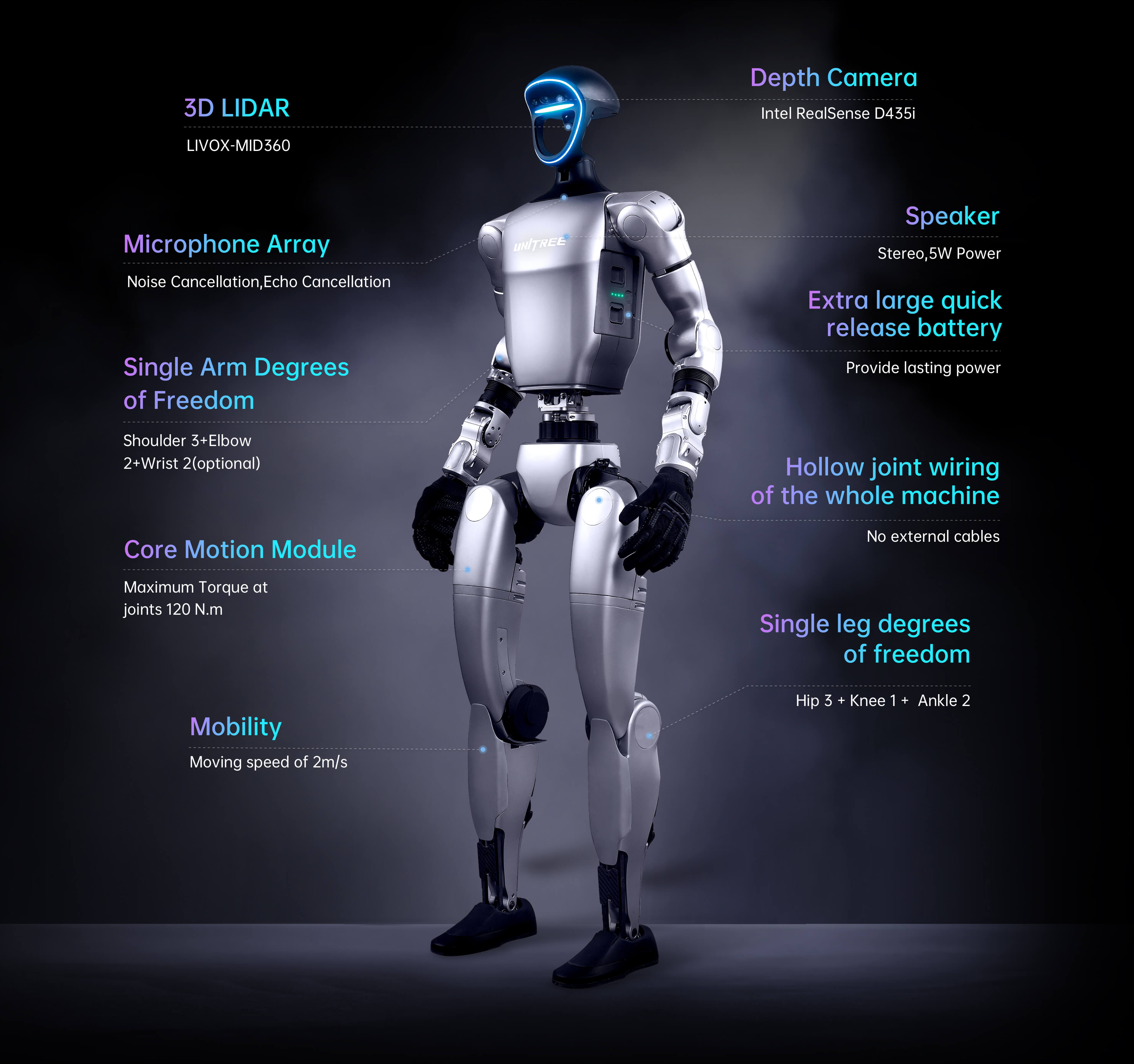
Does the Unitree G1 Edu include sensors for perception?
Yes, the G1 Edu includes a depth camera and a 3D LiDAR, making it suitable for projects involving vision, spatial perception and interaction with the environment.
Is the G1 Edu suitable for robotic manipulation projects?
Yes, depending on the selected version, the Unitree G1 Edu can be equipped with different grippers, including tactile models. It can therefore be used for grasping, manipulation and physical interaction tests.
Is the Unitree G1 Edu humanoid robot suitable for a laboratory or university?
Yes, the G1 Edu is suitable for laboratories, universities, research professors and R&D teams looking for a compact humanoid platform for work in humanoid robotics, motion control, perception and manipulation.