Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
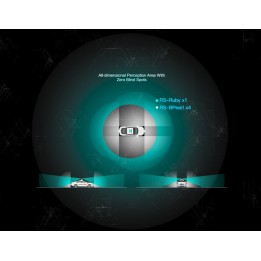
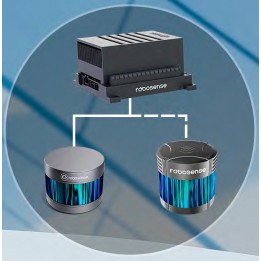
Il LiDAR RoboSense Fairy è un LiDAR digitale a portata intermedia per la percezione 3D nella robotica mobile e nella mappatura 3D.

Il LiDAR RoboSense Fairy è un LiDAR digitale a portata intermedia per la percezione 3D nella robotica mobile e nella mappatura 3D.