














































Il LYNX M20 Pro è una piattaforma robotica quadrupede con ruote che unisce potenza di calcolo, robustezza industriale e mobilità estrema. Questo robot è progettato per ambienti impegnativi e missioni di ricerca avanzata.


Il robot mobile indoor Apollo 2.0 di Slamtec è una piattaforma autonoma di medie dimensioni progettata per applicazioni robotiche avanzate: navigazione autonoma, consegne su più piani, evitamento intelligente degli ostacoli e coordinamento multi-robot.


Il Tracer 2.0 è una base robotica differenziale a due ruote motrici, progettata per ambienti di ricerca avanzata e applicazioni industriali. Combina velocità, potenza, autonomia e apertura allo sviluppo per soddisfare le esigenze di ricercatori e ingegneri.

Il X30 Pro di Deep Robotics incarna l'eccellenza tecnologica nella robotica quadrupede. Rappresenta una soluzione chiave per le industrie che necessitano di ispezioni autonome, sicure e affidabili in ambienti estremi o complessi.

Il Lite 3 è un robot quadrupede avanzato progettato per combinare potenza, agilità e flessibilità, con una struttura modulare adatta per sviluppi avanzati nella robotica.


Lynx è un veicolo terrestre autonomo (UGV) compatto e robusto, progettato per operazioni sia indoor che outdoor.


UMR (Unità di Ricerca Mista) è una piattaforma robotica avanzata e versatile. Con il suo design innovativo, il sistema di navigazione NAVIS integrato e i motori a mozzo indipendenti, UMR si adatta a diverse applicazioni ed eccelle negli ambienti difficili.


Il ROSbot 3 e il ROSbot 3 PRO sono piattaforme robotiche mobili per interni, progettate appositamente per la ricerca e l'educazione.


Il drone terrestre A300 di Clearpath Robotics è una robusta piattaforma mobile in grado di trasportare 100 kg, con un'autonomia fino a 12 ore e la compatibilità con ROS 2 Jazzy per una facile integrazione dei sensori.


RB-VOGUI+ è un manipolatore mobile autonomo versatile, progettato per attività di trasporto e movimentazione in ambienti interni ed esterni, con una portata utile di 200 kg sulla piattaforma e fino a 12,5 kg con i bracci Universal Robots.


Il RB-KAIROS+ offre una soluzione completa e modulare per aumentare le capacità dei cobot di Universal Robots, consentendo un'automazione flessibile ed efficiente per ambienti industriali.


Il RB-SUMMIT è un robot mobile autonomo progettato per applicazioni di ricerca e sviluppo (R&D) in ambienti interni ed esterni, offrendo eccezionale versatilità, flessibilità e modularità.


Il RB-VOGUI è un robot mobile autonomo (AMR) progettato per compiti logistici interni ed esterni, offrendo versatilità e alta mobilità.


RB-THERON è una soluzione modulare basata su architettura ROS, ideale per migliorare l'efficienza dei processi logistici interni.
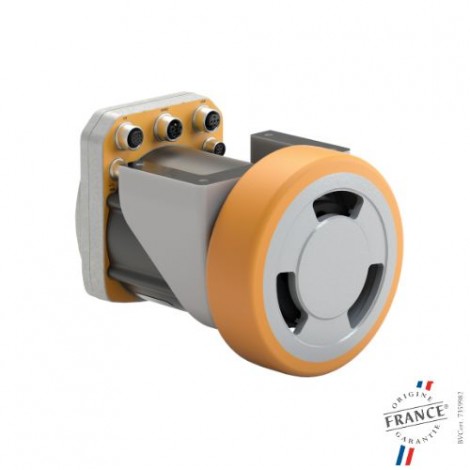

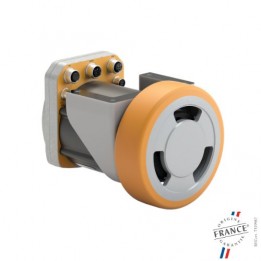
La ruota motrice di sicurezza SWD 125 è progettata per robot mobili AGV/AMR, robot logistici e piattaforme di ricerca che richiedono una soluzione di trazione compatta, controllata e conforme ai requisiti di sicurezza funzionale.


Questa base di ricarica wireless per il robot quadrupede Go2 EDU Plus consente di ricaricare il robot senza rimuovere la batteria.


Preparate una docking station per il vostro Leo Rover per coprire tutte le esigenze del vostro robot di terra!


Una piattaforma robotica telecomandata open source e completa, dotata di hardware migliorato per prestazioni ottimali.


Il laboratorio di ingegneria di Génération Robots (GR Lab) ha sviluppato un kit di ricerca compatibile con ROS2, adattabile alle basi AgileX, Clearpath e Husarion.

Il Unitree B2-W è un robot quadrupede su ruote progettato per spostamenti rapidi, anche in ambienti impegnativi. Offre protezione IP67 e percezione basata su LiDAR 3D e telecamere.


Il Unitree B2 è un robot industriale quadrupede progettato per muoversi su terreni diversi, superare ostacoli e salire le scale.


Il LIMO COBOT è una composizione del LIMO PRO, una piattaforma di sviluppo e apprendimento ROS, dotata di un braccio robotico Mycobot 280.


Scopri il robot mobile ROSbot XL di Husarion, una piattaforma di robotica mobile autonoma progettata per la ricerca e lo sviluppo, la prototipazione rapida e la creazione di robot personalizzati per una varietà di applicazioni indoor.


Panther è un UGV all-terrain di livello industriale progettato per applicazioni all'aperto. È una piattaforma robotica autonoma e open-source che funziona con ROS e ROS2.