





































La pinza del robot FRANKA ROBOTICS gli consente di sollevare un'ampia varietà di oggetti. Può essere programmato e controllato tramite l'interfaccia "Desk" e l'FCI (C++, ROS).


Il robot mobile ROS Warthog è un drone anfibio terrestre con dimensioni impressionanti e una capacità di carico all'altezza. E per di più è veloce!


Leo Rover è un robot mobile per la ricerca e l'istruzione che gira su Raspberry Pi 4 e che può essere personalizzato a piacere con un'ampia gamma di moduli!



Il cuscinetto a sfera A01 si inserisce perfettamente nel vassoio del robot Turtlebot 3 Waffle Pi.


NAO6 in grigio scuro è la sesta versione del robot umanoide interattivo. NAO è autonomo e completamente programmabile. Il robot è progettato per l'istruzione e professionali.


Utilizzate queste piccole parti della struttura Robotis Premium FP04-F10 con il tuo kit Bioloid Robotis Premium per una perfetta compatibilità hardware.

Una confezione di 6 parti di struttura Robotis FP04-F7, da utilizzare esclusivamente con i kit Bioloid.

Una confezione di 12 parti di struttura in plastica ingegneristica Robotis FP04-F6 per il kit Bioloid.

Progettate per sostituire o completare le parti del kit Bioloid, queste 4 parti strutturali Robotis FP04-F54 sono di quelle che durano!

Hai bisogno di parti di ricambio per il tuo telaio Bioloid? Le parti del telaio Robotis FP04-F53 sono proprio quello che ti serve!

Le parti strutturali Robotis FP04-F51/F52 fanno parte dei kit Bioloid che girano su Dynamixel-AX. Il loro materiale li rende estremamente robusti.

Queste 6 parti strutturali Robotis FP04-F5 si adattano ai kit robotici Bioloid e sono compatibili esclusivamente con i servomotori Dynamixel della serie AX.


I cingoli ICT-01 per TurtleBot3 consentono di sostituire le parti usurate dei cingoli del robot in modo semplice e veloce. E si riparte!

Alcuni robot hanno più presa di altri... e con la pinza Robotis RH-P12-RN, il tuo entrerà presto a far parte del club!

Nouvelle évolution du robot humanoïde d'éducation OP par Robotis, Robotis OP3 vous propose des performances améliorées, un système de navigation autonome, et un ROS adapté à tous les utilisateurs de Linux et de Windows.

TurtleBot3 Waffle Pi è una piattaforma ROS economica ed estensibile, ideale per l’apprendimento e la ricerca in robotica mobile. È basata su un telaio compatto con servomotori Dynamixel, Raspberry Pi 4, LiDAR e un’unità inerziale (IMU).

Questa batteria LIPO da 1800 mAh è ideale per alimentare il tuo Turtlebot 3, Robotis OP3 o DARwin-OP. Incorpora una scheda elettronica interamente dedicata alla sua protezione.

12 parti di supporto IBB-01 per TurtleBot Waffle per collegare tutti i nuovi elementi che ti permetteranno di migliorare la tua piattaforma robotica mobile!

Assicurati che il tuo TurtleBot3 abbia ruote robuste e durevoli: il set ruote/gomme TB3-ISW-01 si adatta perfettamente ai servomotori Dynamixel!

Qualcosa da aggiungere al tuo TurtleBot3? Preparati con la piastra IPL-01 per TurtleBot Waffle!


Il robot Ridgeback è una piattaforma robotica omnidirezionale di medie dimensioni per interni, in grado di spostare con precisione carichi pesanti in un ambiente vincolato. Il robot è completamente integrato e viene fornito con telemetri laser anteriori e posteriori e un sistema di misurazione inerziale. Il robot Ridgeback offre un'integrazione nativa con ROS e Gazebo.

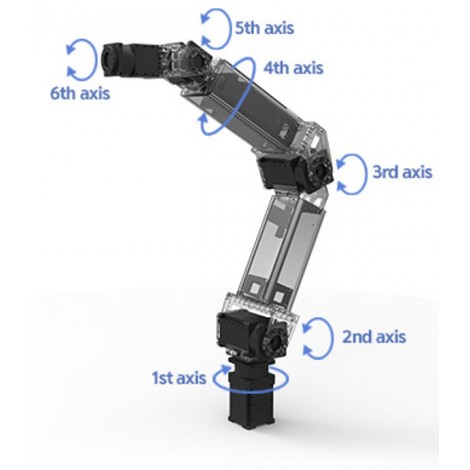
Il braccio robotico a 6 assi ROBOTIS OpenManipulator-PRO, compatibile con ROS, ti stupirà per la sua forza e robustezza, oltre che per la sua precisione e abilità. Ti offre un controllo ultra-preciso su ogni sua azione e viene fornito con un ambiente di programmazione ultra-completo.

Parte strutturale FP04-F4 per il kit Bioloid. Compatibile con i servomotori Dynmaixel AX. Non include le viti di fissaggio.